�����y�T��λ���yλ���m��(y��ng)�����㷨�о�
���������y�T��λ��������늚��{(di��o)��(ji��)�y�Ŀ��ƺ��ģ����е��yλ�����㷨�nj�(sh��)�F(xi��n)�{(di��o)��(ji��)�y�y�Uλ�þ��_��λ���y�T�_(k��i)�Ⱦ��_�{(di��o)��(ji��)���P(gu��n)�I�����y(t��ng)������c(di��n)�_(k��i)�P(gu��n)�㷨�����㷨��(ji��n)�Ρ�푑�(y��ng)�ٶȿ�����c(di��n)�����Ǵ��څ���(sh��)�{(di��o)�����y���o(w��)���m��(y��ng)��ͬ�yо����ͬ�г��{(di��o)��(ji��)�y���_��λ�Ŀ���Ҫ��ˌ����y(t��ng)�幝(ji��)�c(di��n)�_(k��i)�P(gu��n)�����cPID�����㷨��Y(ji��)�ϣ��о���(sh��)�F(xi��n)��һ�N�yλ���m��(y��ng)�����㷨��ͨ�^(gu��)ϵ�y(t��ng)��ʼ������?q��)��F(xi��n)�˿��ƅ���(sh��)�ij�ʼ���������yλ�����^(gu��)���Ќ�(sh��)�F(xi��n)��PID���ƅ���(sh��)�����m��(y��ng)�{(di��o)���y�T��λ����ԇ�(y��n)�Y(ji��)��������ԓ�yλ���m��(y��ng)�����㷨��(sh��)�F(xi��n)���yλ�Ĝ�(zh��n)�_���ƣ��yλ��λ���ȝM��±1%FS���O(sh��)Ӌ(j��)Ҫ��
��������늚��{(di��o)��(ji��)�y��������늚��(zh��)�І�Ԫ���яV����(y��ng)����ʯ�������������a(ch��n)�I(l��ng)���c���y(t��ng)�C(j��)е���(d��ng)�{(di��o)��(ji��)�y��ȣ�����늚��{(di��o)��(ji��)�y���й�(ji��)�ܡ���Ч���Ԅ�(d��ng)��ˮƽ�ߡ��M�B(t��i)��(y��ng)�÷����ͻ����(y��u)�c(di��n)�������y�T��λ��������늚��{(di��o)��(ji��)�y�ĺ��Ŀ��Ʋ�������������ܵă�(y��u)�ӛQ����늚��{(di��o)��(ji��)�y�Ŀ��ƾ��Ⱥ��{(di��o)��(ji��)Ʒ�|(zh��)�����y�T��λ���Ʋ����У����y(t��ng)������c(di��n)�_(k��i)�P(gu��n)�����㷨�����㷨��(ji��n)�Ρ�푑�(y��ng)�ٶȿ�����c(di��n)�����Ǵ��څ���(sh��)�{(di��o)�����y���o(w��)���m��(y��ng)��ͬ�yо�Y(ji��)��(g��u)����ͬ�г�Ҫ��r(sh��)늚��{(di��o)��(ji��)�y���_��λ�Ŀ���Ҫ�������һ�N�����幝(ji��)�c(di��n)�_(k��i)�P(gu��n)���ƽY(ji��)�����m��(y��ng)PID���y�T��λ�����㷨��ԇ�(y��n)������ԓ�㷨�M����г��y�T��λ����Ҫ��
1�������y�T��λ����ϵ�y(t��ng)�Y(ji��)��(g��u)������ԭ��
���������y�T��λ����������(����CPU��A/D��D/A�D(zhu��n)�Q��)������z�y(c��)�·���yλ�������ݔ���·���������ݔ���·��늴��{(di��o)��(ji��)�y�͚��(d��ng)��(zh��)�ЙC(j��)��(g��u)��λ��(�г�)���������y(c��)���·�Ȳ��ֽM�ɡ������y�T��λ���Ĺ���ԭ����ͬ���^(gu��)ȥ�ć������ʽ��λ�����o��ֵ�͌�(sh��)�Hֵ�ı��^�����̖(h��o)��ƽ�⣬����������ƽ�⡣�����������{(di��o)��(ji��)���Ƴ���ȡ���˙C(j��)е��ƽ������^(gu��)�̣����������D(zhu��n)�Q���C(j��)е����(d��ng)�^(gu��)���Юa(ch��n)�������ܜضȡ����(d��ng)�ɔ_�Ȇ�(w��n)�}�������y�T��λ����ϵ�y(t��ng)�Y(ji��)��(g��u)��D1��ʾ��
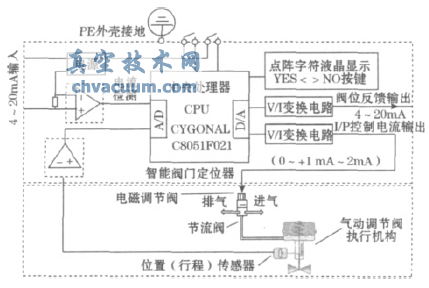
�D1 �����y�T��λ����ϵ�y(t��ng)�Y(ji��)��(g��u)
���������y�T��λ������������(̓�����(n��i))�͚��(d��ng)��(zh��)����(̓������)�M��һ��(g��)�������ƻ�·���y�Tλ�Þ鱻����(sh��)����λ�Â������@�õ��yλ����ֵ�cͨ�^(gu��)ݔ������z�y(c��)�·�õ����yλ�o��ֵ���^���t�õ��y�Tλ��ƫ�Ȼ������yλ�����㷨Ӌ(j��)������������ݔ����IP��Ԫ��늴��{(di��o)��(ji��)�y�Լ����(d��ng)�{(di��o)��(ji��)�y��(zh��)�ЙC(j��)��(g��u)(�QĤ�^)��(l��i)�����y�T��(d��ng)��������_(k��i)�ȴ�С����Kʹ��(zh��)�ЙC(j��)��(g��u)�τ�(d��ng)�y�U���yо�����\(y��n)��(d��ng)��(sh��)�F(xi��n)�yλ���ơ����У�늚��{(di��o)��(ji��)�y���yλ�o����̖(h��o)��4��20mAݔ����̖(h��o)���������yλ�o����̖(h��o)�����y�T��λ������Դ�����⣬�y�T��λ�����Ãɂ�(g��)��λ�_(k��i)�P(gu��n)�O(ji��n)ҕ�y�T�Ƿ��^(gu��)λ���������ޡ�
�����y�T��λ�����Ä��Է���ʎ���B�U���y�T�y�U�cλ��(�г�)�������B�ӣ���늚��{(di��o)��(ji��)�y�Č�(sh��)�H�_(k��i)���D(zhu��n)�Q�����̖(h��o)���Ķ���(sh��)�F(xi��n)�yλ����(sh��)�ęz�y(c��)��λ�Â�������һ�N�b�����S�к���ĥ��象Ƭ���λ��ʽ���������e�m�����L(zh��ng)���B�m(x��)��(d��ng)�������p�ĵĹ��I(y��)��(y��ng)�È�(ch��ng)�ϡ�
����늴��{(di��o)��(ji��)�y��늴ž�Ȧ�������w�yо�M�ɣ�늴��{(di��o)��(ji��)�y����(j��)ݔ������ķ���ʹ�С�Q���yоλ�ú��y�T�_(k��i)�ȣ��Ķ�����Ĥ�^���ҵ��M(j��n)�������Լ�ͨ������ԓ늴��{(di��o)��(ji��)�y����͵ă�λ��ͨ�y�������gͨ����cĤ�^�Ě�����ͨ�����҂�(c��)ͨ����c�M(j��n)��ܾ����B�������(c��)ͨ����c�Ś�ܾ����B����(d��ng)늴��{(di��o)��(ji��)�y���yо̎�����gλ�ã��M(j��n)��ںͳ����ͬ�r(sh��)�]�ϣ�Ĥ�^����;��(d��ng)늴��{(di��o)��(ji��)�y���yо̎���҂�(c��)λ�ã�Ĥ�^�Ś⽵��;��(d��ng)늴��{(di��o)��(ji��)�y���yо̎�����(c��)λ�ã�Ĥ�^�������;��(d��ng)늴��{(di��o)��(ji��)�y���yо̎������λ�ã�Ĥ�^����{(di��o)����ԓ늴��{(di��o)��(ji��)�y�߂��_(k��i)���P(gu��n)���������{(di��o)��(ji��)4�N��B(t��i)�������y�T��λ��������ݔ�������̖(h��o)(0��2mA)���ơ�
��������늴��{(di��o)��(ji��)�y���ƚ��(d��ng)�y�T�ă�(y��u)�c(di��n)��늴��{(di��o)��(ji��)�y��(d��ng)���ٶȿ죬��������dz�С��ʹ���y�T��λ�����е��ĵ����c(di��n)����ˣ�ԓ��λ�����ö�����4��20mA�����늷�ʽ���ɣ��o(w��)�������o���Դ��������ȼ�(j��)�鱾�������������ڷ������I(y��)�F(xi��n)��(ch��ng)��늴��{(di��o)��(ji��)�y����һ��(g��)��(y��u)�c(di��n)���|(zh��)����С����ʹ�ܵ��ܴ����(d��ng)��Ҳ���������������y�T�_(k��i)���O(sh��)��ֵ��(w��n)����B(t��i)�£�����늴��{(di��o)��(ji��)�y�������y�T��λ����늚��{(di��o)��(ji��)�y�����ĺĚ�����С���H�LJ������ʽ���(d��ng)�y�T�Ě�����2%���@����(ji��)�s���ܺġ�
2����������c(di��n)�_(k��i)�P(gu��n)�����m��(y��ng)PID���y�T��λ�����㷨�O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)
��������c(di��n)�_(k��i)�P(gu��n)�Y(ji��)�����m��(y��ng)PID���y�T��λ�����㷨ԭ����(ji��n)�Σ����������^�ã���(sh��)�F(xi��n)Ҳ����(f��)�s���m�ڲ��õ͙n�������ĵͶˑ�(y��ng)��ϵ�y(t��ng)������Ƅ�(d��ng)���^(gu��)�̺Ϳ��Ʋ������£�
����(1)���Ȳɼ��o�����yλ�O(sh��)��ֵW��ԓ�O(sh��)��ֵ��(j��ng)A/D�D(zhu��n)�Q���������ɼ�;
����(2)����������(j��)�Ñ��O(sh��)���Ŀ��Ʒ�ʽ�Լ����������^(gu��)���еõ��ą���(sh��)��(du��)�yλ�O(sh��)��ֵW�M(j��n)���D(zhu��n)�Q̎���������������D(zhu��n)�Q���ֳ̿����D(zhu��n)�Q�����������D(zhu��n)�Q��;
����(3)��(d��ng)ǰ�yλ��̖(h��o)Y��(j��ng)�B�U�C(j��)��(g��u)�������λ��ʽ�������z�y(c��)��A/D�D(zhu��n)�Q�锵(sh��)����̖(h��o)���ͽo������;
����(4)���������У�����(d��ng)ǰ�yλ��̖(h��o)Y��(j��ng)�V������(bi��o)��׃�Q�ͷǾ����������c�O(sh��)��ֵW�M(j��n)�б��^���õ��`����̖(h��o)E;
����(5)����(j��)�`����̖(h��o)E����ؓ(f��)�Q����(d��ng)�������Q�����M(j��n)��߀���Ś⣬������(j��)E�Ľ^��(du��)ֵ�Ĵ�С�Q����(d��ng)����ͺͿ��Ʋ��ԣ���ƫ��E�^��ą^(q��)���������l(f��)���^����B�m(x��)��̖(h��o)��ʹIP��Ԫ��늴��{(di��o)��(ji��)�y���m(x��)�_(k��i)ͨ���yλ���ٸ�׃(���م^(q��));��ƫ��E�^�͵ą^(q��)�����������Å���(sh��)���m��(y��ng)PID���Ʋ��Զ��l(f��)���}�_��̖(h��o)��ʹ늴��{(di��o)��(ji��)�y���m(x��)�_(k��i)ͨ��������׃�yλ(�̲��^(q��));��ƫ��E�����O(sh��)�������^(q��)��С�r(sh��)����ݔ����̖(h��o)���y�Tλ�ñ��ֲ�׃��
�������������Ʋ����У�PID����(sh��)������ϵ�y(t��ng)��ʼ���������M(j��n)�г�ʼ������Ȼ�����y�T��λ�����^(gu��)���и���(j��)�`����̖(h��o)��С����׃�������M(j��n)�����m��(y��ng)�{(di��o)��PID����(sh��)��(j��ng)���m��(y��ng)�{(di��o)�����ٴ�Ͷ���\(y��n)�С�
3���yλ����ԇ�(y��n)�Y(ji��)��
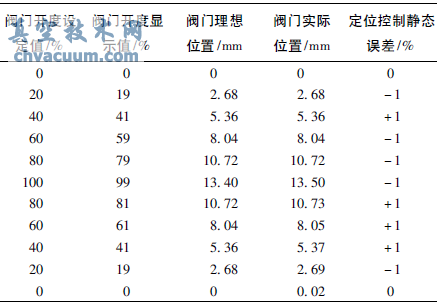
����ϵ�y(t��ng)����Cygnal�ߙn8λ������C8051F021������ƺ��ģ�������\(y��n)���ٶȿ��_(d��)5MIPS���\(y��n)���ٶ��܉�M�����m��(y��ng)�y�T��λ�����㷨���\(y��n)������(du��)�ھ��в�ͬ�yо���ϺͲ�ͬĦ�����ԵĚ��(d��ng)�{(di��o)��(ji��)�y����������c(di��n)�_(k��i)�P(gu��n)�Y(ji��)�����m��(y��ng)PID�Ŀ����㷨��(du��)�y�Tλ���M(j��n)�ж�λ����ԇ�(y��n)��ԇ�(y��n)�зքe�O(sh��)���y�T�_(k��i)�Ȟ�0%��20%��40%��60%��80%��100%��ͬ�r(sh��)���ðٷֱ�y(c��)����ӛ��{(di��o)��(ji��)�y�y�U�Č�(sh��)�Hλ�ü��y�T�Č�(sh��)�Hλ�á������{(di��o)��(ji��)�y������г̞�13.4mm����ˣ������y�Tλ���O(sh��)��ֵ�քe��(du��)��(y��ng)�y�T��(sh��)�Hλ�Þ�0mm��2.68mm��5.36mm��8.04mm��10.72mm��13.4mm.���1��ʾ��ᘌ�(du��)13.4mm�г̡��yо�������Ħ�����ϕr(sh��)���������г̃ɂ�(g��)������y�T��λ����ԇ�(y��n)�Y(ji��)�����ı��п�Ҋ(ji��n)����(du��)��ÿ��(g��)�O(sh��)���yλ�Լ��y�U��(sh��)�Hλ�ã��y�T��λ�����o�B(t��i)�`�����±1%FS�ԃ�(n��i)���M���y�T��λ�����m��(y��ng)����ϵ�y(t��ng)���O(sh��)Ӌ(j��)Ҫ��
��1 �������г̃ɂ�(g��)������y�T��λ����ԇ�(y��n)�Y(ji��)��
4���Y(ji��)���Z(y��)
������������c(di��n)�_(k��i)�P(gu��n)�Y(ji��)�υ���(sh��)���m��(y��ng)PID���y�T��λ�����㷨��(sh��)�F(xi��n)���y�Tλ�õĜ�(zh��n)�_���ƣ��o(w��)���l���Ҳ����ڵ،�(du��)�y�T��λ�����ƅ���(sh��)�M(j��n)���˹��{(di��o)�����{(di��o)У����(sh��)�F(xi��n)���㷨�п��ƅ���(sh��)�Č�(sh��)�r(sh��)�ھ����m��(y��ng)�{(di��o)�����@��������y�T��λ����ϵ�y(t��ng)�Ķ�λ���Ⱥ������ԡ�