�����z���㷨����С�����y���m�����������о�
����Ŀǰ�ܶ���С�����y�Ŀ���ϵ�y�ǷǾ��ԡ��Еr���Ҵ��ڕr׃���mȻ�o�B�r����ϵ�y���������Ƿ����ģ�����B���H�\�Еr�����������F��ʎ������������z���㷨�������m���������ķ������c푑���������Ziegler-Nichols���õ���PID����������^�������z���㷨���������m����������������С�����y���������������ǿ��к���Ч�ġ�
һ������
������С�����y���b�ڽoˮ���ͳ�������������֮�g��������С�����y�������Ě���ݷe������ԓϵ�y�ǷǾ��ԡ��r���Ҵ��ڕr׃���о��ߟo���������_�Ĕ��Wģ�ͣ�������Ҫ���^�����ćLԇ���ܵõ����P��PID���ƅ�����
�����������һ�N�����z���㷨���m��PID��������ͨ�^������B���挍��������һ���_��������PID�������������z���㷨���R��������һ�M���m���r׃����PID������ϵ�yʼ�K̎�ڷ�����B��ԓ�㷨�����^��Ч���ҳ������OӋҪ���һ�M�{��������ϵ�y����푑��죬�����ԃ������c��
������С�����y�r׃ϵ�y
������С�����y���r׃ϵ�y��Ҫ�ɿ����������������ГQ�y�������Ś��y�͚�ȽM�ɡ����H�\�Еr�����ڹ��r��׃���Լ�ԓ�y�Ĉ������ݷe��ԓϵ�y�ǜ��r׃��ϵ�y�����y��PID���������ԣ���������ϵ�y���ӻ���ʎ��
���������z���㷨���m��������
�����z���㷨���m��������ԭ����D��D1��ʾ���Ʌ�����e�C�������������������z���㷨�����ƅ����O�������m��PID�������ȽM�ɡ�
��������ͨ�^������e�C���O�e���،���ą������õ�һ�����ƵČ���ģ�ͣ����o��������ָ�˸����������ķ�����������������ʼ�\�Еrһ�MPID���������Cϵ�y�����\�Еr�Ƿ����ġ���B�\�Еr��������e�C�������R�e�����ģ�ͅ����������ָ���Ƿ�M���Ñ������粻�M�㣬�ý��������һ�M���m��������PID�����������⣬����ԓ�M�����_���z���㷨���������������\���z���㷨���õ��µ�һ�MPID������ͨ�^���ƅ����O���C�����¿�������PID�����ٴ��\�С���������Ĺ̶�����������600s��K1��K2�Ƿ��]�ϣ��Ƿ��M���z���㷨�ą���������ȡ�Q�څ�������ָ���Ƿ�M�㹤ˇ��Ҫ����ˣ�ԓ�������������m���Ĺ��ܣ��ܼ��r�{���������ą������˷��ɔ_���_��ϵ�yʼ�K�Ƿ����ġ�
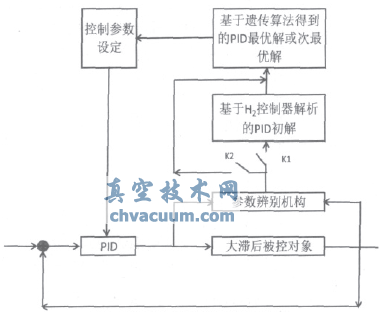
�D1 �z���㷨���m��������ԭ����D
�ġ�����������������
�����������Փ�ij��l�c��ʹijһ��֪ݔ��a����ƽ���`��e����С�����ȃr����С���ә��`���ȵ�2������Min2
�������O�OӋ���������������ă�������ָ�˵õ��Ć�λ������·�������飺C= =
�����cPID������C=Kc(1++TDS)�����^�õ���PID���£�
P= I=+ D=
�塢�z���㷨�������ą�������
����5.1���z���㷨���̈D
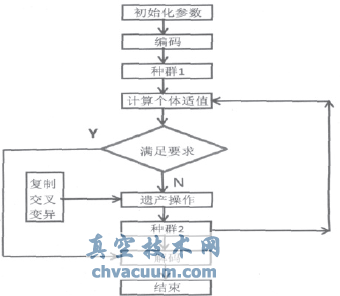
�D2 �z���㷨���̈D
����5.2���������a
������һ�����}�Ŀ��н�������g�D�Q���z���㷨����̎�����������g���D�Q�����Q�龎�a�����a������Ҫ�Ќ������a���������M�ƾ��a���������c�����a�����ȵȡ����IJ��õ��nj������a������
����5.3���_���m���Ⱥ�����
��������һ������ϵ�y��ָ�����������棬�������ԡ��ʴ_�ԺͿ����ԣ���ˣ������x����ָ�ˣ�J=���У�e(t)��ϵ�y�`�u(t)�������ݔ�����������r�g�������Ǚ�ֵ��ȡ�m���Ⱥ����飺F=1/(J+0.0001)��0.0001�Ƿ�ֹ�o�F���o���x���@�Ӯ��ҵ�����m�϶ȵĽ⣬Ҳ���ҵ���СĿ�˺����Ľ⣬�����ɹ������˱��ⳬ�{�������ˑ��P���ܣ���һ���a�����{�������{�����ָ�˵�һ헣��˕r�ָ�ˣ����e(t)<0���tJ=ʽ�О��ֵ���ҡ���
����5.4���x����ƅ�����
�����z���㷨���ƅ�������Ⱥ�wҎģN���������Pc��׃������Pm���@Щ�������xȡ���z���㷨������Ч�ʺ͌�������K�Y���кܴ�Ӱ푡��@��ȡN=30��Pc=0.89��Pm=0.032��
����5.5����ʼȺ�w�γɡ�
�������˷�ֹ���������^������������Ӌ���Kp��Ki��Kd��������ֵ��Ȼ�������@�M�����_���z���㷨�����^���@�������ڿsС�����p�ٌ�����äĿ�ԣ�����Ӌ������Ѹ���ҵ�����λ�á��������O��30����ʼ�NȺ��
����5.6���z��������
�����z���㷨�Ļ��������Ǐ��ơ������׃�����@����Ʋ��õ����m���ȱ�����������ʹ�Æ��c����;���׃�����㷨��
����5.7���u�r�c���
����Ӌ����Ⱥ�w���m��ֵ��Ȼ���Д��Ƿ�M��Kֹ�l��-�Ք���һ��ֵJ���_��С�����_���A����ָ�ˣ�����M�㣬�Y���z���㷨����;������M��t���������M���z��������
����ϵ�y����Y�����^
����6.1��������e���ƌ����һ�A�T�Լ�����������f�����飺
����6.2������푑�����������PID�ķ����õ��Ŀ������������ǣ�Kc=1.4��Ki=0.008537��Kd=58.8��
����6.3������ZN������PID�ķ����õ��Ŀ������������ǣ�Kc=1.3680��Ki=0.0096��Kd=50.8110��푑���������ZN���Ć�λ�A�S푑���������D��ʾ��
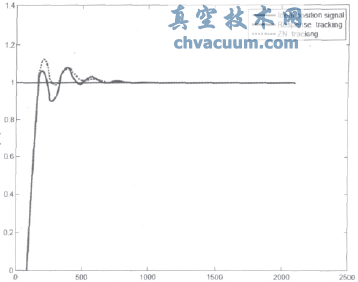
�D3 푑���������ZN�����A�S푑��D
����6.4�����÷��������õ���ʼ��������PID�����飺Kc=0.788��Ki=0.008565��Kd=0.1726���������z���㷨�����R�������õ��Ŀ�����PID�����ǣ�Kc=2.3512��Ki=0.4630��Kd=0.0161�����������z���㷨�����õ���PID����ݔ��푑������D��ʾ��
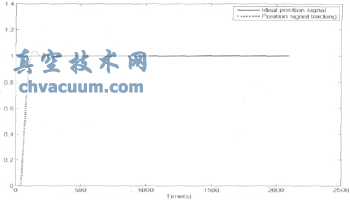
�D4 �z���㷨�����õ���PID����ݔ��푑��D
����6.5����ʹ���r׃������������z���㷨�ķ����õ���PID���������ڳ��{���������r�g����Ҫ�Ŀ���ϵ�y������ָ���Ͼ�����푑���������ZN�����������õĄ��o�B���ԡ�
�ߡ�С�Y
������������˻����z���㷨�����m������������Q����С�����y�����r׃����ϵ�y�IJ�������ʎ�Ć��}��ͨ�^�cһ��푑�����������ZN��ϵ�y������^���z���㷨����������m�����������и��õ������Ժ͜ʴ_�ԣ���һ�N�����^�Ì����ԡ�ֵ���ƏV��PID����������������