�{(di��o)��(ji��)�y��(d��ng)���`��y(c��)ԇ�b��
������B���{(di��o)��(ji��)�y���N�`��Ĝy(c��)��������Փ����һ�N����λ�C(j��)����λ�C(j��)��ݔ��ݔ���ӿڞ�ܘ�(g��u)�Ĝy(c��)ԇ�b�õ��O(sh��)Ӌ(j��)���ṩ���{(di��o)��(ji��)�y���S(ch��ng)ԇ�(y��n)�r(sh��)��(du��)���N�`��Ĝy(c��)�����ھ�(xi��n)У�(y��n)�b�á�
1������
�����{(di��o)��(ji��)�y(�����y) һ���Ɉ�(zh��)�ЙC(j��)��(g��u)���y�T(m��n)�M�ɣ��ǹ��I(y��)�Ԅ�(d��ng)���^(gu��)�̿����I(l��ng)����ͨ�^(gu��)�����{(di��o)��(ji��)���Ɔ�Ԫݔ���Ŀ�����̖(h��o)��������(d��ng)������ȥ��׃���|(zh��)������������Һλ�ȹ�ˇ����(sh��)����K����Ԫ�����{(di��o)��(ji��)�y����(j��)�{(di��o)��(ji��)��λ��̖(h��o)���Ԅ�(d��ng)�����y�T(m��n)���_(k��i)�ȣ��Ķ��_(d��)�����|(zh��)������������Һλ���{(di��o)��(ji��)����������(j��)GBT 4213-2008 Ҫ���O(sh��)Ӌ(j��)��һ�N�y(c��)���{(di��o)��(ji��)�y���(l��i)�`��Ĝy(c��)ԇ�b�ã��ԝM(m��n)����S(ch��ng)�z�(y��n)����Ҫ��
2���y(c��)ԇҪ��
����2.1�������`��
������Ҏ(gu��)����ݔ����̖(h��o)ƽ��(w��n)�İ������pС����ݔ���(zh��)�ЙC(j��)��(g��u)����(��λ��) ���y(c��)����(g��)�c(di��n)����(du��)��(y��ng)���г�ֵ������ʽ(1) Ӌ(j��)�㌍(sh��)�H“��̖(h��o)- �г�”�P(gu��n)ϵ�c��Փ�P(gu��n)ϵ֮�g�ĸ��c(di��n)�`������ֵ��������`�

������������Ҏ(gu��)����ԇ�(y��n)�c(di��n)��(y��ng)���ٰ�����̖(h��o)������0��25%��50%��75%��100%�傀(g��)�c(di��n)���y(c��)��?j��)x�������`���ޑ�(y��ng)�����^(gu��)��ԇ�{(di��o)��(ji��)�y�����`����1/4��
����2.2���ز�
�����ز��ԇ�(y��n)�����c�����`����ͬ����ͬһݔ����̖(h��o)�����y(c��)�õ������г̵�����ֵ�Ľ^��(du��)ֵ����ز
����2.3�����^(q��)
����(1) ������׃( �����pС) ݔ����̖(h��o)��ֱ���^���һ��(g��)�ɲ��X(ju��)���г�׃����ӛ���@�r(sh��)��ݔ����̖(h��o)ֵ��
����(2) ���෴��������׃( �pС������) ݔ����̖(h��o)��ֱ���^���һ��(g��)�ɲ��X(ju��)���г�׃����ӛ���@�r(sh��)��ݔ����̖(h��o)ֵ��
����(3) ����(1) ��(2) ���(xi��ng)ݔ����̖(h��o)֮��Ľ^��(du��)ֵ�������^(q��)�����^(q��)��(y��ng)��ݔ����̖(h��o)���̵�25%��50% ��75%���c(di��n)���M(j��n)��ԇ�(y��n)��
����2.4��ʼ�K�c(di��n)ƫ��
������ݔ����̖(h��o)�ϡ�����ֵ�քe������(d��ng)��(zh��)�ЙC(j��)��(g��u)����( ��λ��) ���y(c��)ȡ����(y��ng)���г�ֵ����ʽ( 1) Ӌ(j��)��ʼ�K�c(di��n)ƫ�
����2.5���~���г�ƫ��
������ݔ����̖(h��o)������(d��ng)��(zh��)�ЙC(j��)��(g��u)����( ��λ��) ��ʹ�y�U����ȫ�̣���ʽ( 1) Ӌ(j��)���~���г�ƫ�
3��ϵ�y(t��ng)�O(sh��)Ӌ(j��)
�����y(c��)ԇ�b����Ҫݔ��ʹ�{(di��o)��(ji��)�y��(d��ng)���Ŀ�����̖(h��o)�����ո��N�y(c��)�������������Ĝy(c��)����̖(h��o)��Ŀǰ�x��������DDZ -���(bi��o)��(zh��n)���̖(h��o)����4 ��20mA DC �������̖(h��o)��1 ��5V DC ��늉���̖(h��o)���ٔ�(sh��)�x���Ա���DDZ -���(bi��o)��(zh��n)0 ��10V DC ��늉���̖(h��o)����˜y(c��)ԇ�b�þ߂��@���N���̖(h��o)��ݔ��ݔ�����ڜy(c��)ԇ�{(di��o)��(ji��)�y��̖(h��o)�c�г̵�ͬ�r(sh��)��߀�߂䔵(sh��)��(j��)̎������(sh��)��(j��)�惦(ch��)����(b��o)��ݔ�����ھ�(xi��n)У�(y��n)�Ĺ��ܡ�����(g��)�y(c��)ԇ�b������λ�C(j��)����λ�C(j��)�c��̖(h��o)�ӿڽM��(�D1) ��
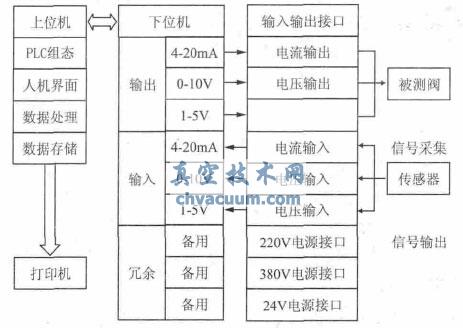
�D1 ϵ�y(t��ng)�Y(ji��)��(g��u)
����3.1����λ�C(j��)
������λ�C(j��)�ǿ���ֱ�Ӱl(f��)���ٿ������Ӌ(j��)��C(j��)����Ļ���@ʾ���N��̖(h��o)׃���c����������_(k��i)�P(gu��n)��ݔ���ȡ���λ�C(j��)�l(f��)�����������Ƚo��λ�C(j��)����λ�C(j��)�ٸ���(j��)�������ጳ�����(y��ng)�r(sh��)����̖(h��o)ֱ�ӿ�������(y��ng)�O(sh��)�䡣��λ�C(j��)���r(sh��)�xȡ�O(sh��)���B(t��i)��(sh��)��(j��)(һ���ģ�M��) ���D(zhu��n)�Q�ɔ�(sh��)����̖(h��o)�����o��λ�C(j��)��
�����y(c��)ԇ�b���У���λ�C(j��)����һ�_(t��i)ƽ����X�����bPLC ����ܛ���c�y(c��)ԇϵ�y(t��ng)ܛ������(sh��)�F(xi��n)PLC �M�B(t��i)���˙C(j��)���桢��(sh��)��(j��)̎������(sh��)��(j��)�惦(ch��)����(b��o)��ݔ���Ĺ��ܡ��Ñ�(h��)�ڜy(c��)ԇϵ�y(t��ng)ܛ����ݔ���{(di��o)��(ji��)�y�_(k��i)�ȣ���λ�C(j��)�ٸ���(j��)���_(k��i)���D(zhu��n)�Q�����̖(h��o)ݔ�������Ʊ��y(c��)�y��ͬ�r(sh��)��λ�C(j��)�����xȡ�������Ĝy(c��)����̖(h��o)���D(zhu��n)�Q�ɔ�(sh��)����̖(h��o)�����o��X�������y(c��)����(sh��)��(j��)��ӳ��ܛ�����湩�Ñ�(h��)�鿴��
����3.2����λ�C(j��)
������λ�C(j��)��ֱ�ӿ����O(sh��)��@ȡ�O(sh��)���r��Ӌ(j��)��C(j��)���ڜy(c��)ԇ�b������Ҫ��(sh��)�F(xi��n)��̖(h��o)ݔ������̖(h��o)�ɼ����ܡ�
������λ�C(j��)�߂���4 ��20mA DC �����̖(h��o)��1 ��5VDC 늉���̖(h��o)��0 ��10V DC 늉���̖(h��o)�İl(f��)���͜y(c��)�����ܡ��{(di��o)��(ji��)��̖(h��o)����̖(h��o)�l(f��)�����a(ch��n)�����y(c��)����̖(h��o)�ɔ�(sh��)��(j��)�ɼ������ա��ɼ���̖(h��o)��PLC ��ɡ�
����PLC ��������Ɔ�Ԫͨ�^(gu��)����(xi��n)��ʽ�c��λ�C(j��)����ͨӍ����(sh��)�F(xi��n)��(sh��)��(j��)��ݔ���ܡ�����λ�C(j��)���bPLC�ľ���ܛ������ռ��g(sh��)�W(w��ng)��http://smsksx.com/���J(r��n)����˾S�o(h��)ϵ�y(t��ng)���õij����Ľӿ����á�����(j��)�����ھ�(xi��n)У�(y��n)�Ȳ�����������ͨ�^(gu��)��λ�C(j��)�����ݵČ�(sh��)�F(xi��n)��
����3.3��ݔ��ݔ���ӿ�
����ݔ��ݔ���ӿ��ǜy(c��)ԇ�b���c���y(c��)�y늚��B�ӵĽӿڣ��ڜy(c��)ԇ�b���в�����B�����O(sh��)Ӌ(j��)����B����һ���ɲ��^�Ͳ����M�ɣ������^�Q(ch��ng)�����ɶ��B�����������Q(ch��ng)��̶��B������ͨ�^(gu��)���^�Ͳ����IJ�Ϻͷ��x��(sh��)�F(xi��n)�·���B�Ӻ͔��_(k��i)���y(c��)ԇ�b���x��ʽ��B��������늚���̖(h��o)�ӿڡ��ڹ��w�ϰ��b��B�����̶��ˣ����ɶ˲��ú�����ʽ���������|�������y(c��)�y�c�������Ӿ�(xi��n)��
4���Y(ji��)�Z(y��)
�����{(di��o)��(ji��)�y��(d��ng)���`��y(c��)ԇ�b�Ì�(du��)�ژ�(bi��o)��(zh��n)������ĸ��(xi��ng)�`��ܿ�����Ч���M(j��n)�Мy(c��)������(j��ng)�^(gu��)��(sh��)�`�(y��n)�C�����о��ȸߡ��؏�(f��)�Ժá���̖(h��o)�N�(l��i)ȫ���Ӿ�(xi��n)��ݡ��S�o(h��)���㡢���Ƅ�(d��ng)�����c(di��n)���ܺܺõĝM(m��n)���{(di��o)��(ji��)�y���S(ch��ng)�z�(y��n)�Լ��ھ�(xi��n)�z�y(c��)��Ҫ��
���������īI(xi��n)
����[1] �S��. �y�T(m��n)��������ԇ�(y��n)�b�Ô�(sh��)��(j��)�O(ji��n)��ϵ�y(t��ng)����[J]. ���w�C(j��)е��2010��7: 27 - 31.
����[2] GBT 4213 - 2008. ���(d��ng)�{(di��o)��(ji��)�y[S].
����[3] ���I(y��)�Ԅ�(d��ng)���x���cϵ�y(t��ng)�փ�(c��)[M]. ����: �Ї�(gu��)��������磬2008.
����[4] ���܊. �������c�z�y(c��)���g(sh��)[M]. ����: ��ӹ��I(y��)�����磬2008.
����[5] ף���t. ��(sh��)��(j��)�ɼ��c̎�����g(sh��)[M]. ����: ��ӹ��I(y��)�����磬2008.
����[6] �Bԣɭ. �^(gu��)�̿���ϵ�y(t��ng)���x��[M]. ����: �C(j��)е���I(y��)�����磬1999.





