�\Մ����Ȍ�(d��o)���g(sh��)�������y�T��λ���еđ�(y��ng)��
���������y�T��λ�����и߿ɿ��ԡ��߿��ƾ��ȡ������הUչ����ͨӍ�����c������m��(y��ng)���I(y��)�����wϵ�g�W(w��ng)�j(lu��)�������ɻ������ܻ��l(f��)չ�����Ҫ�ĸ����Ͽ˷��˂��y(t��ng)�Cеʽ�y�T��λ�����ʓp�Ĵ�푑�(y��ng)�ٶ������װl(f��)�ᡢ�Cеĥ�p��늴Ÿɔ_��ȱ�c�������y�T��λ����(y��ng)�Ú���Ȍ�(d��o)���g(sh��)���F(xi��n)��(n��i)����·���ƣ�����С�y���Ɖ��s�՚��������É��s�՚��ƄӴ��y�T���Ķ����F(xi��n)���ؽ��|(zh��)���������ƣ��@�N�ּ����Ƶ�˼��ͨ�^����y��(y��ng)�õ��Ԍ��F(xi��n)��
�������I(y��)�^�̿��Ʋ�����W(w��ng)�j(lu��)�����ֲ����ܻ��l(f��)չ���m��(y��ng)���O(sh��)����픵(sh��)�ֻ���Ҫ���{(di��o)��(ji��)�y���^�̿���ϵ�y(t��ng)��Ҫ�Ĉ�(zh��)�в����������{(di��o)��(ji��)�y�\�еķֲ����ܻ���Q������(y��ng)�\�����������y�T��λ�����Д�(sh��)��(j��)̎������B(t��i)�R�e�������\�ࡢ�ھ����x���yԇ���p��ͨ�ŵȹ��ܡ��^�̿���ϵ�y(t��ng)���{(di��o)��(ji��)�yͨ�^�F(xi��n)���������ƣ�ʹ�����ߌ��F(xi��n)�ˌ��{(di��o)��(ji��)�y���A(y��)�y�ԾS�o�ͿƌW(xu��)������Ӌ��C���g(sh��)����Ӽ��g(sh��)��ͨ�ż��g(sh��)�������A(y��)���\�༼�g(sh��)�İl(f��)չ��Ҫ�������y�T��λ������m��(y��ng)�W(w��ng)�j(lu��)ͨӍ�c��늹���������IJ��֚�ӿ��Ʋ�����회��F(xi��n)�����ܺ��\�У����C�W(w��ng)�j(lu��)��������ϵ�y(t��ng)�\�а�ȫ�ɿ���
�������y(t��ng)�Ě���y�д���ʹ����늴�ԭ���������-�Cе�ܵ��D(zhu��n)�Q������(y��ng)�þ�Ȧ��늴��F��늴���Ч��(y��ng)�����Ƶ����̖�D(zhu��n)�Qλ�Cе�Ą������Ƅ��yо�Ą������Ķ����F(xi��n)��·���ГQ����w�����������Ŀ��ơ��M��늴��F�;�Ȧ���Ѓr��������ӹ�����ă�(y��u)�c�����书�ʓp�Ĵ�푑�(y��ng)�ٶ������l(f��)�ᡢ�Cеĥ�p��늴Ÿɔ_��ȱ�cͬ�r���ڣ�ͨ�^��׃늴��F���Ϻ��y�ļӹ���ˇ���������φ��}��ͬ�r������˳ɱ��Ĵ�����Ӻͼӹ���ˇ����څ��(f��)�s�����ҟo���ĸ����Ͻ�Q���}�����F(xi��n)���ġ����ܼ��ɡ��߾��ȡ�����푑�(y��ng)���L�����Ě�ӿ��Ƴɞ���������
1�������y�T������x
��������(j��)����GB/T22137.2-2008�����I(y��)�^�̿���ϵ�y(t��ng)���y�T��λ����2���֣����ݔ�������y�T��λ�������u���������������y�T��λ��(IntelligentValvePositioner)����̎�������g(sh��)����A(ch��)�����Ô�(sh��)�ֻ����g(sh��)�M�Д�(sh��)��(j��)̎�����Q�����ɺ��p��ͨ�ŵ������^�̿��ƃx���������y�T��λ������늷�ʽ�ɷ֞�Ϊ���늺Ͳ��ÆΪ���늣����������e�ɷ֞�����Ͳ�������
2�����y(t��ng)�y�T��λ�����چ��}
����2.1�����ò��Ç�����弼�g(sh��)���Cе��ƽ���ԭ�����ɄӲ����^�࣬���ܜضȡ����Ӱ푣�
����2.2�����{(di��o)��(ji��)�yҎ(gu��)�����ϵ�Ħ����r�������{(di��o)��(ji��)�yӲ���M���y�Ԍ��F(xi��n)��ѿ��Ơ�B(t��i)��
����2.3����̖�������ǿ��ƃx��������붨λ���ģ������F(xi��n)���ϕr���������\�����λ�û�ԭ��
����2.4��������ױ��҉m������Դ��ʹ��λ����������������
����2.5���������B�m(x��)���o���s�՚⣬�ܺ��^��
����2.6���г̺����c�{(di��o)�����跴��(f��)�{(di��o)�����{(di��o)У�韩��
����2.7�����܆�һ���ɔU���Բ
3�������y�T�����(y��u)�c
����3.1����λ���ȺͿɿ��Ըߡ��Cе�ɄӲ����٣�ݔ����̖���yλ������ֱ̖���M�Д�(sh��)�ֱ��^�������ܭh(hu��n)��Ӱ푣���(w��n)���Ժã������ڙCе�`����ɵ����^(q��)Ӱ푣����и��ߵĶ�λ���ȺͿɿ��ԣ�
����3.2�����������ķ��㡣�����y�T��λ����ֱ�����Ȱٷֱȡ����_���Թ���ģ�K������ͨ�^���o����λ�C���ֳ�ʽ�O(sh��)�����M�Д�(sh��)��(j��)�O(sh��)����
����3.3�����c�������{(di��o)�����Ρ����c�{(di��o)���c�����{(di��o)���������棬�{(di��o)���^�̺��ο�ݣ�
����3.4�������\��͙z�y���ܡ���һ����Լ��\���֮�⣬��ݔ���c�{(di��o)��(ji��)�y���H����������(y��ng)�ķ�����̖�������h���x�O(ji��n)���{(di��o)��(ji��)�y�Ĺ�����B(t��i)�����Ք�(sh��)����̖�������y�T��λ���������p���ͨӍ���������Ծ͵ػ��h���x��������λ�C���ֳ�ʽ�������M���y�T��λ���ĽM�B(t��i)���{(di��o)ԇ���\�ࡣ
4�������y�T��λ������ԭ��
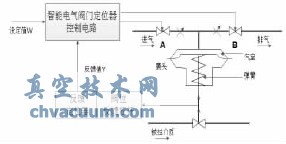
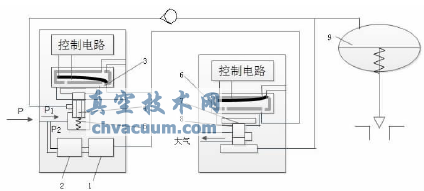
�D1 �����y�T��λ������ԭ��D
���������y�T��λ��ϵ�y(t��ng)��Ҫ�ɿ��Ɔ�Ԫ��늚��D(zhu��n)�QI/P��Ԫ���yλ�z�y������Ԫ�M�ɡ���λ���͈�(zh��)������(g��u)��һ��������·��ݔ���Ԫ���܁��Կ�������4-20mA�����̖���{(di��o)��(ji��)�yλ�÷�����̖���鱻��׃���c�o����ֵ̖��̎�������M�б��^����ƫ��ͨ�^�����ư��ݔ���ڰl(f��)����ͬ�L�ȵ��}�_���{(di��o)��(ji��)���Ś��ٶȺ̈́������_�������(q��)���{(di��o)��(ji��)�y�����ʹ_��λ���^�̡�
5������Ȍ�(d��o)���g(sh��)
�����D1�У������yA��B�Á����Ɖ��s�՚��M������{(di��o)��(ji��)�y���yA���M���y���yB���Ś��y���@�ɂ��y�T��ֻ���_�P(gu��n)�ɷN��B(t��i)���@�N����˼�댍�H������С�y�����Ɖ��s�՚����������É��s�՚��ƄӴ���y�T�����Ʊ��ؽ��|(zh��)���������@�N�ּ����Ƶ�˼�뼴�����Ȍ�(d��o)���g(sh��)�đ�(y��ng)�á�
����������r�̣��yA��B֮��ֻ����һ���_ͨ����һ���_�P(gu��n)����A�_ͨ�r�����ډ��s�՚≺������Ĥ�^��(n��i)���������s�՚��M���{(di��o)��(ji��)�y���y�U�����Ƅӣ���֮����B�_ͨ�r���{(di��o)��(ji��)�y���҃�(n��i)���s�՚⽛(j��ng)B�����⣬�y�U�ڏ��������������Ƅӡ��������y�T��λ���У��������c�����·�ӿڣ��yA��B���_ͨ�c�P(gu��n)�]����܉�����������ƣ����Hʹ�����yA��B�Ђ��y(t��ng)늴��y������y�ȶ�N��͡���鉺��y�����-�Cе���D(zhu��n)�Q���е��ġ�����푑�(y��ng)���o늴Ÿɔ_���o�l(f��)��F(xi��n)�o�Cеĥ�p���L�������Y(ji��)��(g��u)���Ρ����ܴ����ӛ_���ȃ�(y��u)�c����ȡ���˂��y(t��ng)늴��y���V����(y��ng)�á������͉���y�����Ȍ�(d��o)�����������͉����M���Mһ���ŴĶ����F(xi��n)��ӿ��ơ�
6������y����ԭ��
����6.1�������(y��ng)
������늾��w��һ�N�մɹ��ܲ��ϣ����w��D2A����y��ʼ��B(t��i)�nj��Q���ĵĘ�(g��u)�죬�����D(zhu��n)�Q��͙ܺCе�ܣ���������ԓ���w��׃�a(ch��n)�������Ч��(y��ng)�����늈�����ԓ���w�a(ch��n)��늘O���ͳ��F(xi��n)��(y��ng)׃��(y��ng)�����扺�Ч��(y��ng)������y���ǻ��ډ����Ч��(y��ng)�����й�(ji��)�ܵ���(�(q��)������H10��)�������ͻ�������푑�(y��ng)�������Ժõ��@�����c��Ҳ�����y�T��λ��ȫ��(sh��)�ֻ���
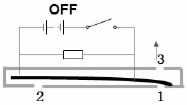
�D2 A����y��ʼ��B(t��i)
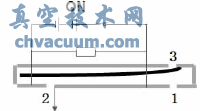
�D3 B����yͨ늠�B(t��i)
����6.2������ԭ��
��������y�ij�ʼ��B(t��i)��DA���մ�Ƭ�����ڇ�����ϣ�����2��3�Ȍ�(d��o)ǻ�Bͨ���γ����w��������yͨ늕r���մ�Ƭ׃�����N����ס�����3������2��1(li��n)ͨ��
����6.3���Y(ji��)��(g��u)ԭ��
��������y��I/P�D(zhu��n)�Q��Ԫ�����Ȍ�(d��o)�y�����ã�ÿһ��I/P�D(zhu��n)�Q��Ԫͬ�r��(y��ng)�Ãɂ�����y������yI����I/P�D(zhu��n)�Q��Ԫ��ݔ��(�M���y)������yII����I/P�D(zhu��n)�Q��Ԫ(�Ś��y)��
�������ډ���y����մ�Ƭ�������ޣ������Ȍ�(d��o)ǻ�҃�(n��i)�≺���С��1.2kg��Ҫ������{(di��o)��(ji��)�y�����⣬��회��F(xi��n)�����Ŵ����Ȍ�(d��o)ǻ��һ��(c��)��һ������eĤƬ���ڿ����M����ų��{(di��o)��(ji��)�y������һ��(c��)�B�U��e�^С�����Ȍ�(d��o)�≺�_��1.2kg�r��ʩ�����Ȍ�(d��o)ǻ��ĤƬ�ϵ��������������ڳ����Ś�ǻ��һ��(c��)���ϵĉ������@��ʹ����yо���Ś��yо�Ƅӣ�ʹ�����������ų��{(di��o)��(ji��)�y�����У�ʹ�����К��w���������ͽ��ͣ��c������һ��(c��)�����_���µ�λ��ƽ�⣬�_�������y�T�_�ȵĹ��ܡ�
�����������·(li��n)ͨ�Դ����yI�ϟo늉�������yII��늉����ƣ���ԴP2�M�뉺��yII���Ȍ�(d��o)ǻ���У��γ�120KPA�≺������(d��o)���Ƅ��Ś��yо�����Ƅӣ��Ś���P(gu��n)�]���@�r����������·�l(f��)��ݔ���≺�����}�_������yII�t���֠�B(t��i)������yI�ӿ���늉��������մ�Ƭ���Ϗ������մ�Ƭ��ס����y����3����ԴP2ͨ�^�����1�M�뉺��yI��(d��o)��ǻ�ң��γ�120KPA���ҵĚ≺�����Ƅ��Ƅ��yо�����Ƅӣ���ԴP1ͨ�^�M����M�뵽����{(di��o)��(ji��)�y��Ĥ���У��(q��)�Ӛ���{(di��o)��(ji��)�yλ���{(di��o)��(ji��)�����_���O(sh��)��λ�ã�����yI��늉�׃?y��u)?���䌧(d��o)��ǻ�Қ≺׃?y��u)?����(f��)λ�����Ƅ��Ƅ��yо�P(gu��n)�]ݔ���ڣ�����{(di��o)��(ji��)�yĤ���еĚ≺�͕������������㶨�����¡���Ҫ�pС����{(di��o)��(ji��)�yĤ���еĚ≺�r������yI����늉���0������yII����늉�Ҳ��0���䌧(d��o)��ǻ�ҵĚ≺Ҳ׃?y��u)?���Ś��yо���Ś⏗�ɵ������£����_�Ś���Ś⣬�_��Ĥ�Ҝp����Ŀ�ġ�
�����@�Ӳ���،�����yI��II�Ŀ��ƣ�I/P�D(zhu��n)�Q��Ԫ�����ݔ�����w�������Ś⣬�Ķ��(q��)�Ӛ��w�{(di��o)��(ji��)�y�����^�y�w�Ľ��|(zh��)�M�������{(di��o)��(ji��)��
7�������y�T��λ���đ�(y��ng)��
1�^�V����2���{(di��o)��(ji��)������3����yI��4�Ƅ��yо��5��(f��)λ����6����yII��7�Ś��yо��8�Ś⏗�ɣ�9����{(di��o)��(ji��)�y
�D4 �����y�T��λ���Y(ji��)��(g��u)ԭ��D
�����S�� DCS�ͬF(xi��n)����������ϵ�y(t��ng)(FCS)���Ƴ����\�ã������y�T��λ�����������ܬF(xi��n)���x����������и߿ɿ��ԡ��߿��ƾ��ȡ������הUչ������ͨӍ���ܵ����c����ȫ���m��(y��ng)���I(y��)�����wϵ�g�W(w��ng)�j(lu��)�������ɻ������ܻ��l(f��)չ�����Ҫ���ЏV韵đ�(y��ng)��ǰ����
����7.1�����ڿ��ƾ����^�ߵ�ʯ�����a(ch��n)�^�̣�����ϩ�ѽ⡢���ѻ�����(y��ng)����ϵ�y(t��ng)�����a(ch��n)�^�̣�����߮a(ch��n)Ʒ�|(zh��)����
����7.2��ʯ��ϵ�y(t��ng)�кܶ��½���Ľ����a(ch��n)�b�ò������ܶ�λ�����ɼ������ܿ���ϵ�y(t��ng)�����Ӱ�ȫ�Ժͽ�(j��ng)���ԣ�
����7.3��������ʹ�ó�Ҏ(gu��)�{(di��o)��(ji��)���ȃx�����Ƶ����a(ch��n)�b�ã���ʹ�����ܶ�λ�������ƿ���ϵ�y(t��ng)������߿��ƾ��Ȼ�˷���ˇ�^�̹ܾ����Ӵ��Ӱ푣�
����7.4���������b���gС����Ҫ���{(di��o)��(ji��)�y�����o�����ܕr����ʹ�������y�T��λ���ĔUչ����ģ�K������Î��yλ׃��ģ�K�����ܶ�λ�����܌��F(xi��n)��ͨ��λ�����yλ׃�����Ĺ��ܣ�
����7.5����ʯ��ϵ�y(t��ng)�⣬�����y�T��λ��߀������ʯ�͡�������ұ�������ˮ̎�������z�ȹ��I(y��)�^���С�
�Y(ji��)�Z
��������Ȍ�(d��o)���g(sh��)�͉�늼��g(sh��)�đ�(y��ng)��ʹ�����y�T��λ���Ŀ���׃�ɬF(xi��n)�����S�����I(y��)�F(xi��n)��Խ��Խ����(y��ng)���¼��g(sh��)����̖�������O(sh��)�䣬���Ñ��H���F(xi��n)�����r���l(f��)�������Ñ�ʹ�ú������y�T��λ���ɞ�a(ch��n)Ʒ�O(sh��)Ӌ���M�����c�������ڽY(ji��)��(g��u)�ͼ���(ji��)�������������y�T��λ�����õذl(f��)�]��λ���ơ���(sh��)��(j��)̎������B(t��i)�R�e���A(y��)�y�ԾS�o���p��ͨ�ŵĹ��ܣ����F(xi��n)��ȫ����Ч���L�����\�С�