����LabVIEW��늄ӈ��ЙC���yԇ�_
����̓�M�x�����g���S��Ӝy�����g�cӋ��C���g�İlչ���\�����ġ�������Ӄx����ͨ�ã��x�����ܵĽM����׃�����`����������g���ܸ����ܡ���ԭ��늄ӈ��ЙC���yԇ�_�Ļ��A�ϣ���������NI��˾��LabVIEW̓�M�x��ܛ���_�lƽ�_���������M��̓�M�x�����g����LabVIEWܛ���鹤�ߣ�������DL/T641-2005�վ�y�T늄ӈ��ЙC�����˜ʣ��_�l�����˱��yԇϵ�y��
1���yԇ�_
����늄ӈ��ЙC���yԇ�_�ڂ���ԭ���Ͻ��b�������M�{ԇ�_���g���ڴ˻��A���OӋһ���d�����b���c��̖�z�y�b�ã����û���LabVIEW�������_�l�yԇܛ��ƽ�_��
1.1���yԇ�_���w�Y��
����늄ӈ��ЙC���yԇϵ�y�ɜyԇ�_���w��Ӌ��C�������ɼ������yԇܛ���Լ���ܿ��������M�ɣ���D1��ʾ��
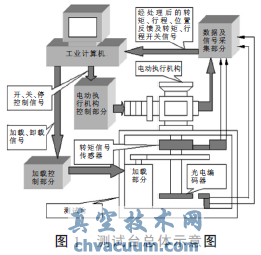
�������Мyԇ�_���w�əCе�ӿڲ��֡����d�b�á��D����̖���������г�λ�Â������M�ɡ�
�����yԇ�_�\�Мy��ܛ��(LabVIEW)��ͨ�^�����ɼ����lָ�����ϵ�y�\�У����ɼ���̎�������ַ�����̖�팍�F�yԇ�_�ĸ��N���ܡ�����Ҫ���D�yԇ���֡��г̜yԇ���֡�늄ӈ��ЙC�����Ʋ��֡��{ԇ�_���d/ж�d���֡���̖�ɼ��c̎�����ֵȘ��ɡ�
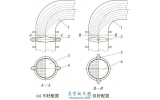
1.2���D�yԇ����
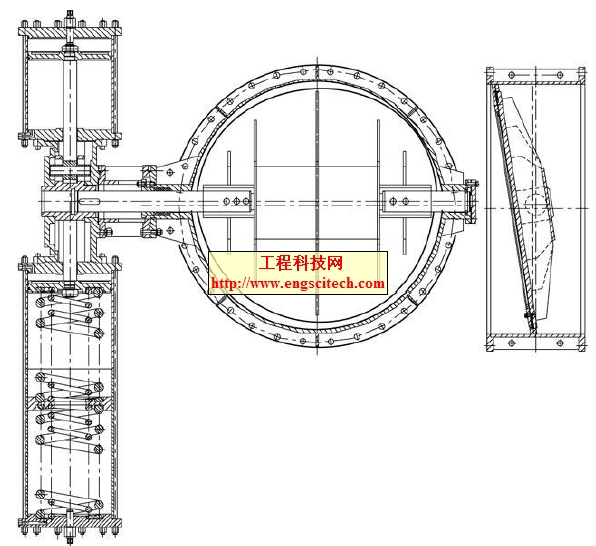
�����D�yԇ���������ؙz�y�c���d�b�ýM��(��D2��ʾ)�����yԇ��������������
�������d�b�ð��Ƅӷ�ʽ�֞�Ш�ΉK�Ƅӡ��ŷ��Ƅ��c���x�Ƅӡ�Ш�ΉK�Ƅ���ͨ�^늄ӈ��ЙC������Ш�ΉK���Ƅӣ�������Ħ��Ƭ�ɾo�����F���d�cж�d;�ŷ��Ƅ���ͨ�^����Ĵ�С���ƴŷ�׃�������F���d�cж�d;���x�Ƅ�����܇�Ąx܇ԭ����ͨ�^Һ�����Ƶ��x���ɾo�����F���d�cж�d�����d�������ö��ֱ�����a���c�M����������ֻ��BШ�ΉK�Ƅ��c���ֱ�����a�����D�yԇ������
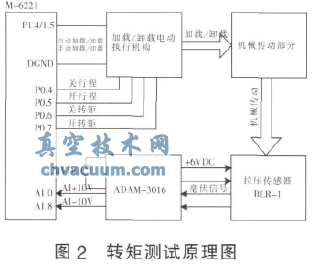
�������ֱ�����a���������d��ͨ�^LabVIEW�Č��ÿ���M6211��P1.4��P1.5�ɷN���������Ƽ��d늄ӈ��ЙC�����_���c�P���F���dШ�ΉK��ǰ�M�c���˵��Ƅ���������Ħ��Ƭ���ɾo���_�����d�cж�d��Ŀ�ġ����d늄ӈ��ЙC���_�г̡��P�г̡��_���ء��P����ͨ�^����M6211��P0.4~P0.7�������Ĕ����ͽoϵ�y�������d�b���M�б��o��
�����yԇ�_�����y늄ӈ��ЙC�����yԇ�r�ļ��d�cж�d�����������������d��ж�d����������׃���D������������̖���ٽ�ADAM-3016��̖�{��ģ�K�Ŵ��D�Q��±10VDC��̖�������o������AI0�cAI8��������ģ�M����̖���ͽoϵ�y��
.3���г̜yԇ����
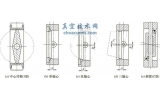
�����г̜yԇ������ҪԪ���ǹ�늾��a��(OMRONE6B2-CWZ6C)����늾��a�����b�ڜyԇ�_�����S�ϣ��c���y늄ӈ��ЙC����ݔ���Sͬ�����г̜yԇ��Ҫ�yԇ늄ӈ��ЙC�����؏Ͷ�λ���ȣ���늾��a����һ�N�}�_�������a����ÿ�Dһ���γ�2000���}�_����λ��ƫ���h�h����DL/T-641-2005�˜ʣ����ړP������O������S2SA3ϵ�г��S�˜ʣ�����D≤5°;���ֻ��D≤1°;ֱ�г�≤0.1mm;�{���ͻ����`��≤±1%;�{���ͻز�≤1%���г̜yԇԭ����D3��ʾ��
�����}�_�������a���Dz���AB�������}�_����λ���90°������늄ӈ��ЙC�������D�\���D���������}�_��̖�����o�����ɼ����֣�ͨ�^AB����ǵ��Ⱥ��Єe늄ӈ��ЙC�����\�ӷ����}�_��Ӌ���\�ӽǶȼ��г̡�����M-6221��PFI8�cPFI10�քe���վ��a����A���cB�ࡣ
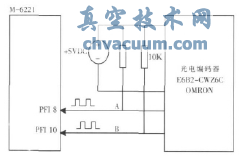
�D3 �г̜yԇԭ��D
1.4��늄ӈ��ЙC�����Ʋ���
�����yԇ�_��늄ӈ��ЙC�����Ʋ�����Ҫ�Ǹ���Ӌ��C�l����ָ�������늄ӈ��ЙC�����\�У����OҕĿǰ�Ĺ�����B(Ҋ�D4)����ϵ�y��늄ӈ��ЙC���ıO�أ��֞�ݔ���cݔ���ɂ����֡�늄ӈ��ЙC����һ���Դ�֞������c������������ܻ��֞��Ԏ����ƽM���c�������ƽM���ɷN��
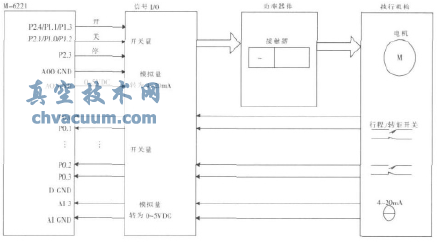
�D4 늄ӈ��ЙC���yԇԭ��D
����ݔ�����֣����������������ƽM����늄ӈ��ЙC��������ͨ�^M-6221��P1.1��P1.0��P2.3����ܿ�����l���_���P��ָͣ�����ͨ�^M-6221��P1.3��P1.2��P2.3����ܿ�����l���_���P��ָͣ�����ܿ������еĹ��ʽM���M�п��ơ�
�����������펧���ƽM����늄ӈ��ЙC����ͨ�^M-6221��P2.4��P2.1��P2.3ֱ�Ӱl���_���P��ָͣ��o늄ӈ��ЙC���Ĺ��ʽM���M�п��ơ��{����늄ӈ��ЙC�����������{ԇ�⣬߀Ҫ�M��ģ�M�����ƣ�ģ�M�yλ������ͨ�^M-6221��AO0�cAOGND�a����0~5VDC��׃����̖���^����ģ�K�D�Q��4~20mAģ�M��ֱ���M�ж�λ���ơ�
����ݔ�벿�֣�늄ӈ��ЙC�����_���г̡��P���г̡��_�����ء��P������4���_�P����̖�ͽoM-6221��P0.1~P0.3���Ķ����乤����B�Oҕ���{����늄ӈ��ЙC���������������⣬߀Ҫ�M��ģ�M��λ�÷�����늄ӈ��ЙC����4~20mAλ����̖��ͨ�^����ģ�K�D�Q��0~5VDC���ͽoM-6221��AI3�cAIGND�a��ϵ�y�R�e��λ����̖��
2��ϵ�y�����w�Y���c�OӋ
2.1��Ӳ���OӋ
����Mϵ��DAQ�aƷ��NI��һ���Ķ�ܔ����ɼ��O�䡣Mϵ��PCI-6221�����ɼ�����16·ģ�Mݔ��(AI�����IJɘ������_250K��A/D�D�Q���Ȟ�16λ)��2ͨ��ģ�M��ݔ��(AO���D�Q����740K��D/A�D�Q���Ȟ�16λ)��߀��24ͨ������I/O��2��ͨ��32λ���r/Ӌ��������ȫ�܉�M��yԇ�_���ƹ��͔ܺ����ɼ�����Ҫ��
�����yԇ�_�ù��IӋ��C�cM-6221�����ɼ���������ADAM3016��̖�{��ģ�K������������ݔ���ĺ�������̖�Ŵ��D�Q��±10VDCݔ���������ɼ���������ZCM-3081ͨ����̖�{��ģ�K��4~20mA���ݔ���D׃��0~5VDCݔ���������ɼ���������ZCM-3271ͨ����̖�{��ģ�K�������ɼ���ݔ����0~5VDC�D׃��4~20mA���ݔ�����^���ݔ���忨���ơ��ӿ��·�壬��늾��a����̖���x�·��������аl��
2.2��ܛ���OӋ
����NI�ĈD�λ��_�lܛ��LabVIEW���ÈD�λ��ľ����Z�ԣ����к��Ρ��W�����x�ԏ��ȃ��c��ͨ�^�����еĔ����ɼ����ֿ��Ժܷ���،��ⲿ��ģ�M��/�_�P����̖�ɼ��M���M��̎���c������̖ݔ�����Ԍ��Fϵ�y�ĸ�헿��ƹ��ܡ�
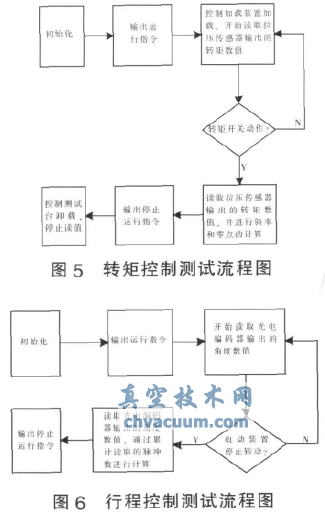
�����yԇ�_�yԇϵ�yܛ������NI�ĈD�λ��_�lܛ��Lab-VIEW�������D�ء��г̿������̷քe��D5���D6��ʾ��
2.3������̎��
�����yԇ�^�����漰�Ķ�N��ֵ(���������������D�ؔ�ֵ����늾��a���ĽǶȔ�ֵ��)���xȡ�^���о��п��ܳ��F�`��D�ؔ�ֵ�c����������ݔ��늉���ֵ֮�g���Pϵ������С���˷��M��ֱ�����㷨��ͨ�^���yԇ�_�M�И˶��_���D�ؔ�ֵ�c����������ݔ��늉�֮�g�ľ����Pϵ�����M��ֱ����б�ʺ����c����yԇϵ�y�������xȡ�������������D�ؔ�ֵ�^���У�����늄ӈ��ЙC���D���_�P�����ĕr�g�̣����Բ��ø߲ɘ���(10K)�̕r�g��(0.1s)�xֵ�����M�ОV����ƽ��̎����������õ��Ĕ�ֵӋ����ƽ��ֵ�������늄ӈ��ЙC��ݔ���Č��H�D�ؔ�ֵ�����Fܛ���V������늾��a���ǶȔ�ֵ�xȡ�^�����x���M���O�Þ�߃��ȼ������}�_�D����Ƕȵ�Ӌ���^����ϵ�y����Ӌ�㣬�酢���yԇ�ľ��_���ṩ�˱��C����K�γ���D7��ʾ���Ѻõ��˙C���档
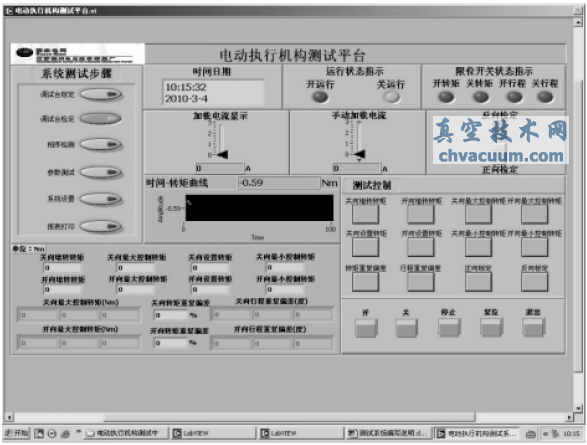
�D7 ���ܜyԇ�_�yԇϵ�yǰ���ʾ��D
3���Y�Z
������Ӌ��C�����؆�Ԫ����LabVlEW��ܛ��ƽ�_���_�l��늄ӈ��ЙC���yԇԇ�ϵ�y����ְl�]��̓�M���g�ă��ݣ��˙C�����Ѻá����Ρ����ã����ɶȸߡ����F�������Ԅ��@ʾ���Ԅ�ӛ䛡��Ԅӷ������ԄӴ�ӡ�ȹ��ܡ��yԇ�_�����H���a���ã����ܿɿ����yԇ늄ӈ��ЙC���ĸ�헼��g�����ʴ_�����ڮaƷ���|���c���a��������ʮ�ַe�O�����x����̓�M�x�����g�����ڙz�yϵ�y����ͨ�š����Йz�y��Ӌ��C���ơ�Һ���ȼ��g��һ�w�������@���ęC�Һһ�w��������
�����īI
����[1]����ɽ.LabVIEW�������c̓�M�x�����̑���[M].�������Ї��F�������磬2009
����[2]����E.�Һ�LabVIEW——һ��NI���̎���ʮ�꾎�̽��[M].�������������պ����W�����磬2009