늄ӈ��ЙC����̎�����Ŀ��Ʒ���
����������늄ӈ��ЙC�������Rȫ���o���I���a�F�����\�к;S�o�����˘O��ı�����Ȼ����Ŀǰ�Ј��ϵ�������늄ӈ��ЙC��߀�o���_����ͬ�r�M���m���ֹ��r�l���Լ��ԃr�ȸߵ�Ҫ���Q������늄ӈ��ЙC���ڹ��I���a�F����ƥ�䣬������ڶ�̎����ģ�K���OӋ������ͨ�^��ͬģ�K�ĽM�ϣ����Ԍ��F��ͬҪ��Ŀ��ƹ��ܡ�������ϵ�y������ģ�K�������ܛ�������˙C��Ԓģ�K��ϵ�y����ģ�K(�����ơ�늙C�ӡ������\������̖������ϵ�yͨ�ŵ�)�������ɼ�ģ�K(�yλ��̖�ɼ���������̖�ɼ����h���_�P����̖�ɼ���ģ�M����̖�ɼ�)��ϵ�y����ܛ���������Ϳ���ϵ�yͨ�^ģ�K�g�fͬ�����������{�䣬���F���y�T늄ӈ��ЙC������ϵ�y�����ܻ���ͨ���ԏ����߿ɿ��Ժ��S�o��Ҫ��
1����̎����ģ�K���OӋԭ��
����������늄ӈ��ЙC������ϵ�y���˙C��Ԓģ�K��ϵ�y����ģ�K�������ɼ�ģ�K���Ծ߂�һƬ̎��������̎����ؓ؟��ɸ�ģ�K���{�ȡ����ƹ��ܣ���ϵ�y����ģ�K�����C������ģ�K��ęC��ͨ�^UART�ڻ�I2C���п���������ͨ�Ņf�h����ɸ�ģ�K�g�Ĕ���ͨ���c���ƹ��ܡ�ϵ�y�OӋԭ����D��D1��ʾ��
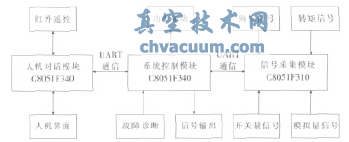
�D1 ����ϵ�yԭ��
2���˙C��Ԓģ�K���OӋ
�����˙C��Ԓģ�K�߂��B�@ʾ�������M�B���g�[���t���b�صȹ��ܣ�Ӳ���������@ʾ�����͵ز������I��ָʾ�����t��l���c�����O��ȽM�ɡ�����C8051F340��Ƭ�C���F�˙C��Ԓ���ܡ�C8051F340��I/O�ڿ�������͵ز������I��ݔ��ڣ�Ҳ���������Bָʾ����ݔ���ڣ�����@ʾ�����@ʾ���ܡ�ģ�Kͨ�^UART�ڌ��F�t�┵���İl���c���գ��D2���˙C��Ԓģ�K�ļt��l���·��
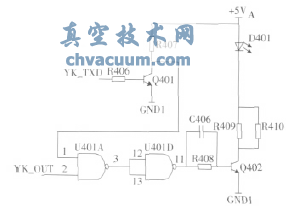
�D2 �t��l���·
3����̖�ɼ�ģ�K���OӋ
������̖�ɼ�ģ�K��Ҫ���F�yλ��̖���D����̖�IJɼ���������늄ӈ��ЙC�����yλ��������Ҫ�֞�ɷN������ʽ�������ͽ^�����a��������ʽ�������Y���������Σ���̖����������̎�����^���ף��������Դ�����r�£���Ҫ늳ع�늱����yλӋ����һ��늳�늉��^�ͻ�o����늣�늄ӈ��ЙC���yλ���ׁGʧ���o�F�����a�\�Ў������㡣�^�����a������ÿһ��λ�Ì�����ͬ�ľ��a�������yλӛ�����ܣ����ԟo�늳ع�늣�Ҳ�������F�yλ�Gʧ�F���^�����a����Ӳ����ܛ��Ҫ���^�ߣ��e�����׳��F�`�a����Ҫ�M��ܛ��̎������ʹ�á��D3������ʽ����������̖�ɼ��·��
�D3 �yλ��̖�ɼ��·
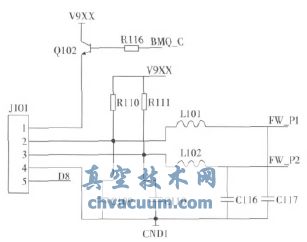
�����������\�Р�B�£���BMQ_C���_����ƽ�r�����O��Q102��ͨ��V9XX���yλ��������늣����yλ�l��׃���r���yλ������ݔ����·�����}�_���}�_��̖��D4��ʾ��
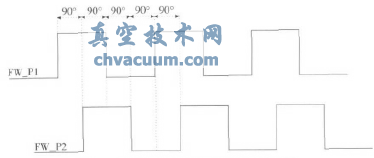
�D4 �yλ�������}�_��̖�D
������̖�ɼ�ģ�K��ͨ�^̎������I/O�ڲɼ��yλ���������}�_��̖��ͨ�^����������Ӌ�����ǰ�yλ��B��Ȼ��ͨ�^���п��������yλ����������ϵ�y����ģ�K��ϵ�y����ģ�K�ٌ��������f���˙C��Ԓģ�K��ͨ�^�˙C�����@ʾ����ǰ�yλ��B��
����������늄ӈ��ЙC�����D�ؿɷ֞�Cе�D�غ�����D�أ��Cе�D�غ��οɿ��������D���_�P�Ą������Д��D���Ƿ��_���O��ֵ�����Cе�㲿���ӹ����b���Ҫ���^��;����D�ز������Ԫ�����ď�����׃�a����늉���̖���f�D��ֵ��ʹ��ǰ��Ҫ�M���D�ؘ˶�������̖�ɼ�ģ�K��ܛ��Ҫ���^�ߡ��ڷ��Ϙ˜ʵ��D��Ҫ���£����ÙCе�D�ؼ��ɝM��������늄ӈ��ЙC���D�ؿ���Ҫ����̖�ɼ�ģ�K�Ɍ��D������̖���f��ϵ�y����ģ�K���Ķ�����늙C���_���P��ͣ������
����������늄ӈ��ЙC������ϵ�y���h�̠�B�r��ͨ�^�_�P����̖ݔ��Ӳ���·�������_���P��ָͣ����̖������늄ӈ��ЙC��������P������������ⲿ��̖�ɔ_����̖�ɼ�ģ�Kͨ�^����N109��N110��N111���h���_�P��ݔ����̖�M����̖���x�����x����_�P����̖�����Ƭ�C��IO�ڡ�IO�����Þ����������_©��ʽ����ܛ�����Ʒ�ʽ�в���“ȥ��”̎����ʽ���ܜʴ_�����r�ɼ��_�P��ݔ����̖����Ч�����`���������늄ӈ��ЙC���\�еĿɿ��ԡ����ֹ�����ⲿ�Ӿ��e�`������Ӳ���·�p�ģ����ö��O��VD111����Ч����Ӿ��e�`������Ӱ푡�
4��ϵ�y����ģ�K���OӋ
����ϵ�y����ģ�K��Ҫ���F늙C�ӹ��ܺ������\�����ܣ���ͨ�^���п������xȡ��̖�ɼ�ģ�K�Ĕ�����Ϣ��̎�����ٰl�����˙C��Ԓģ�K��
������������̖�����·���FӲ�����i���ܣ������|�l��̖ͬ�r��Ч���¿��ƻ�·�Ɂy������C8051F340��Ƭ�C��·IO�����鹦�����·�|�l��̖��һ·IO�������|�l��̖ݔ�����Դ������̖�����·�����|�l������̖���Mһ������|�l��̖�ɿ��ԡ�IO�����Þ����췽ʽ�����ƽ��Ч�����ù���TLP521-4���|�l��̖�M����̖���x�������|�l��̖�ɔ_�����C늄ӈ��ЙC���ɿ��������\�С�
����ϵ�y����ģ�K߀�߂�������\���c���ܣ����Д�����ϬF��r���������σ��ȼ�����ȫ���C���ɲ�ȡ��ͬ���Ʒ������x��λ���\����ָ��λ�ã�ͬ�r��ݔ�����Ϡ�B��̖�������˙C��Ԓ�����@ʾ���ϴ��a��