׃�l�{��������늄ӈ��ЙC�����Ʋ��ֵ��о�
�������ķ����ˇ�����늄ӈ��ЙC�����о��F��Ͱlչڅ�ݣ����ڇ��ȬF��ͬaƷ���A�ϣ�����׃�l�{�ټ��g����Ƭ�C���g����Ӽ��g���_�l�˼����ЙC�����ӆ�Ԫ�{�����Ɔ�Ԫ���F���@ʾ�x���Ȟ�һ�w�ęC�һ�w���F������������늄ӈ��ЙC����������ҪՓ��׃�l�{����늄ӈ��ЙC���еđ��á�
��������늄ӈ��ЙC���ǹ��I�Ԅӻ�ϵ�y�еĈ��І�Ԫ������늄әC�������Դ����������̖�D�Q�������Ą����������y�T��λ�á����ķ����ˇ�����늄ӈ��ЙC�����о��F��Ͱlչڅ�ݣ����ڇ��ȬF��ͬaƷ���A�ϣ�����׃�l�{�ټ��g����Ƭ�C���g����Ӽ��g���_�l�˼����ЙC�����ӆ�Ԫ�{�����Ɔ�Ԫ���F���@ʾ�x���Ȟ�һ�w�ęC�һ�w���F������������늄ӈ��ЙC��������늄ӈ��ЙC���ĽY������Ҫ�֞���Ʋ��֡������Ӳ��֡���̖�z�y���֡����Ʋ�����Ҫ�Ɇ�Ƭ�C��EPROM��PWM�l������IGBT��׃��������ģ�K���_�P��ݔ��ݔ��ͨ���ȽM��;�����Ӳ�����Ҫ��������늙C�͙Cе���Ӳ��֡�������ҪՓ��׃�l�{����늄ӈ��ЙC���еđ��á�
����Ŀǰ��׃�l�{���яV��������ʯ�ͻ�������늵��T���I����׃�l�{�ٵĿ�����Փ����lչ��ͬ�r���c֮�����Ŀ����ֶκͼ��gҲ�������ֻ��cܛ��������Ѹ�ٰlչ�������Ӽ��g�İlչ�齻���{�ٵ춨�����|���A��������������������ʻ������l����ģ�K�������ܻ�����lչ������׃�l���ڝM��������ָ�˵�ͬ�r���pС�w�e���������ơ����ͳɱ���Ŀǰ���R�Ć��}֮һ����ǰ���ñ��^�V���Ŀ��Ʒ����mȻ����Ч�����^�ã����^�ڏ��s�������OӋ��׃�l�����Tᘌ�С����늙C�������w�eС���ɱ��͵ă��c��
1��׃�l���y�T�{�������x
����Ҫ���F�yλ�ľ��_�������{����Ҫ����ЙC���������y�T�������ӣ������A�νY����������u���٣��s��푑��r�g������{���ٶȣ��ڽӽ��O���yλ�r���ܽ����ٶȣ��������_ָ��λ�ö��o���{���ڎ����y�T��ȫ�P��ȫ�_λ�Õr�����ܱ����y�T���_�^�Ȼ����ȬF��Ҳ�ܱ��C����ȫ���_���P�]��
�����@Ȼ��Ŀǰһ���늄ӈ��ЙC�����y�ԝM������Ҫ��ġ���׃�l���g������늄ӈ��ЙC���������܈A�M�Ľ�Q�������}������ʹ�yλ���{���|�����|����ߡ����{���^���У��y�T�\�е��ٶȺ����ض���׃���ġ����_���y�T�r��׃�l����늙C��ܛ���ӹ���ʹ늴��D�ؼ��D����u���ӣ����F�y�T��ƽ���_�������ԜpС������������Cе�_��;�y�T�_��֮����늙C�D����u���ߣ����C���O���yλ�Ŀ���푑�;��Ҫ���_�O��λ�Õr����ʹ��Ѹ�پ��_�Ķ�λ������늙C���ٶȽ��ͣ�ʹ�y�T�������_�O��λ�ö����a�����{��ͬ�r�����y�����yо֮�g�a��ײ���������a��Һ���_���Ĉ��ϣ�߀��ͨ�^��׃����늙C�D���Ԝp���y�T�P�]�ٶȣ����L�P�]�r�g���pС������Һ���_����
�����@�ӣ�׃�l����늙C�����y�T��׃���ġ�������Ҫ���ٶ��\�д��������yλ�{���ľ��ȺͿɿ��ԡ������{���^�̼ȿ��١����_��Ҳ�����Ԇ�ͣ��ʮ�ֈA�M�Ľ�Q�˳�Ҏ���و��ЙC���ıײ���
����׃�l�{�ټ��g�ڈ��ЙC���еđ��ã��O��������˂��y���ЙC����ȱ�ݣ������f�Lj��ЙC�����g��һ���w�S��
2��׃�l�{�ٻ�·�Ĺ���ԭ����ϵ�y�OӋ
2.1��׃�l�{��ϵ�y�Y��
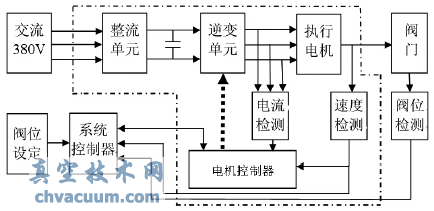
����׃�l�{��ϵ�y�������·�Ϳ����·�����·������Ҫ�IJ�����������׃��Ę��ɣ������·������Ҫ�IJ�����׃�l������̖PWM�������ɡ�������ʹϵ�yӲ���·���Ρ��ߴ�С���ɿ��Ըߺ��_�l�r�g���Լ�ռ�Æ�Ƭ�C�C�r�٣������x���ܮa��PWM���đ�����늙C׃�l�{�ٵ�PWM�l����SA4828�����������IGBT��׃ģ�K������׃����������
����׃�l�{��ϵ�y����·�齻ֱ��늉���׃�l�·�����ɶ��O������ģ�KVDM��ֱ���V����ݺ�IGBT��׃ģ�K�M�ɡ�
2.2��׃�l�{��ϵ�y���·�OӋ
����늙C�������~������0.75kW���~�����2.1A���~��늉�380V��
������������ݔ��늉������l����늣����]�ӞV����ݕr��������ʽ�����·ݔ����ƽ��ֱ��늉��飺
������Udc=0.9U1=0.9×220=198V
�������ϞV����ݺ�Udc�����ֵ���_��������늉��ķ�ֵ��
2.3���������O��ģ�K�ą���Ӌ��
�����������O�ܵ��x��늙C�����ؓ�d��������ܿɿ���������r�¿��]���������^���O�ܵ������Чֵ�飺
����ʽ�У�Im��늙C���ؓ�d�����ֵ����ֵһ��ȡ��늙C�~�������5-6�����ʶ��O�ܵ��~������飺
�������O�ܵ��͉�ֵ�飺
����ʽ�У�U21��׃�������ξ�늉���Чֵ��
2.4���V����ݵ��x��
������ݔ����ྀ늉���220V�r������ݔ�������늉���311V�����]��늉���10%�IJ��ӣ��t���ݔ�����_342V����˞V����ݵ��͉�ֵ���ڴ�늉�֮�ϣ�����һ���İ�ȫԣ�ȣ���ȡ�V����ݵ��͉�ֵ��450V����Փ�ϣ��V����ݵ�ֵԽ��Խ�ã������]���w�e�ɱ������أ����ֵҲ�������x��̫�����ϣ����gֱ���V����ݵ������Ǐ�����늉����ӵĽǶȁ��x��ģ����������x3��450μF���X늽���ݡ�
2.5����׃�������������x��
����IGBT�Lj����ʹ����_�PԪ��������r�g����С�������^�d�������ڌ��H���Õr����ؓ�d����ص������x����Ԫ����
��������Ԫ��������~��ֵ��
����ʽ�У�λ——늙C���^�dϵ����һ��ȡ1.5��2;In——늙C���~�������
�������⣬߀�����C��������IGBT�ļ�늘O-�l��O�~������늉�Uceo���ّ��錍�H�Г�����߷�ֵ1.2�����ϣ��t�����������͉�ֵ��
���������x��IPM��600V/20A�����ܹ���ģ�K�������^��N��̖��IPM����K�������˾��PM20CSJ060��
2.6������ϵ�y��Ӳ���OӋ
��������ϵ�y����Ӌ��C����ĵĜy���Ϳ���ϵ�y����������ϵ�y�ɂ��������^��ݔ��/ݔ���O�估���ЙC���Ȳ��ֽM�ɡ���ϵ�y�����N������B�M�Ќ��r�����ɼ���̎�������䌍ʩ���ƣ��Ķ�����Ԅӿ����΄ա�
������Ƭ�C�����伯�ɶȸߡ��w�eС���ɿ��Ըߡ����܃r��Ⱥõȃ��c�V�����������܃x�����y��ϵ�y�����ؙC����Ӌ��Cϵ�y�����ܽӿ��Լ���늷��档���܈��ЙC���ĽY������Ҫ�֞���Ʋ��֡������Ӳ����Լ���̖�z�y���֡����Ʋ�����Ҫ�Ɇ�Ƭ�C��EPROM��PWM���l������IPM��׃����A/D�D�Qģ�K������ģ�K�ȽM��;�����Ӳ�����Ҫ��������늙C�͙Cе���Ӳ���;�z�y������Ҫ����ֱ��늉��z�y����������z�y���yλ�z�y��
����EPROM���ڴ�ų���ͱ���;8255�Uչ���п������B��SA4828���ӑB�@ʾ���I�P���ⲿ�O��;�I�P���@ʾ����ݔ����@ʾ�O�䅢���ͽo�������@ʾϵ�y��ǰλ�á��\���ٶȡ��\���l�ʵȅ������҂��x���^����Ϥ��8λ��Ƭ�C89C51�������܈��ЙC���Ŀ��ƺ��ġ�������늄ӈ��ЙC���І�Ƭ�C��ؓ����ϵ�y����̖̎��������ϵ�y���D�ء��y�T�_�����P�]���y�T�_�ȵ��O����̖�����ṩ����PWM���l����SA4828����Ҫ�Ŀ�����̖;̎��IPM�l���Ĺ�����̖�͈���̖;̎��ͨ�^ģ�Mݔ��ڽ��յ������늉���λ�õșz�y��̖;�ṩ�@ʾ늄ӈ��ЙC���Ĺ�����B��̖;���п���ϵ�y���Ŀ�����̖�������ϵ�y������Ϣ������늄ӈ��ЙC�����ؓ�Y�����D��ʾ�����OӋ����Ҫ�΄՞�̓����Ȳ��֡�
3��ϵ�yܛ���OӋ
�����ڱ���ϵ�yܛ���ľ����^���У���ѭ��ԭ�t�ǣ�ܛ��Ҫ����ȵ��cӲ����ϣ���ְl�]���ԵĹ����ԝM�����ϵ�y����Ҫ��ԭ�t�ϣ���ϵ�y���S����r�£��M���ܲ���ܛ�����p��Ӳ����ʹ�á�����@�ӿ��Թ�ʡ���M�_֧���p����Ӳ�������Ӷ�����ϵ�y�ɿ��Ե��[��������ܛ���OӋ�`����㡢�����ģ����S������ȡ���������^Ӳ���Ĺ�Ч�������@�N“��ܛ��Ӳ”����ռ�ø����Ӌ��C�C�r����r�ġ��mȻ�p����Ԫ�����Ĕ�Ŀ��ϵ�y�Ĺ����ٶ��������ͣ��@��ij�N���r��Ҫ���^�ߵĈ����Dz����S��;���ڌ��r��Ҫ���ǺܸߵĈ��τt���߃�Խ�ԡ�
4���YՓ�cչ��
�������Ļ��ں�����ʸ�����Ʋ��ԣ���89C51��Ƭ�C��PWM�a����SA4828��PM20CSJ060����ģ��Ժ������ɿ���ϵ�y���ɣ�����ȫ���ֻ��ķ�ʽ�����F��늄ӈ��ЙC����׃�l�ӣ�������Q���y�T�p�ġ������Ȇ��}�͂��y�y�T�{���ķ����Ժ��`����֮�g��ì�ܣ��������y�T�ٶ��{�����ԡ�