늄ӈ��ЙC���ǶȜy�������ĸ��M
��������JB/T8219-1999Ҫ���M�н��г�늄ӈ��ЙC���Ĝyԇ�У�����ָ���c���yݔ���S�г����P����ȫ�A�x��y����һ���ľ����ԣ�һЩ��r���Dz��ܝM��yԇҪ��ġ��\�þ��a���ھ��ܶ�λ���ٶȡ��L�ȡ����ٶȡ���ӵȷ���õ��V���đ��ã��Ҿ��нY�����Ρ�Ӌ�����ȸߡ������L�ȃ��c����ȫ�����OӋ���M��yԇҪ��ķ�����
1�����M�����������M����
������JB/T8219-1999�����I�^�̜y���Ϳ���ϵ�y��늄ӈ��ЙC�����˜��е�5.2.4�l���Ќ�ԇ��Ãx���ľ���Ҫ����“������`�С�ڻ���ڱ��y���aƷ�����`����1/3�������̷����c���yֵ�ķ������m����”
�������˜ʵ�5.4.1����ʽ���ЙC���Ļ����`��Ӌ�㹫ʽ��
����δ�������`�L1��ݔ���S�г̌��yֵ(°)��L0��ݔ���S�г̼s����ֵ(°)��L��ݔ���S�~���г�(°)��
�������˜ʵ�4.2.1�����`��Ҫ��1�����`����±1%��
�����������~�����г�ֵ��50°��70°��90°120°��270°�@5�N������Ӌ���@5�N�~�����г̵����S���ֵ�`�
�����O��L0��=0°��L=�քe����50°��70°��90°120°��270°;δ=1%����(1)ʽ���ⷽ�����L1�����S���ֵ��ã�L1=0.5°��0.7°��0.9°��1.2°��2.7°
�������y���x���ľ��ȑ��鱻�y���aƷ�����`����1/3���õ��y���x���ľ��Ȟ�0.17°��0.23°��0.30°��0.40°��0.90°��
��������ȫ�A�x���b�ڈ��ЙC����ݔ���S�ϕ��а��bƫ�ĬF���bƫ�ľ���ָȫ�A�x�ĈA���cݔ���S���S�IJ��غϣ���Dһ��ʾ���Oȫ�A�x�돽��R��O��ȫ�A�x�ĈA�ģ�O'��ݔ���S���S�ģ�O�cO'֮�g�ľ��x��d�����O��ʼ�c(��λ)��X�S�ϣ���ݔ���S�D�ӽǶȞ�α’�r��ȫ�A�x����ݔ���S�D�ӵĽǶȞ�α���ɈD�ó����Pϵʽ��
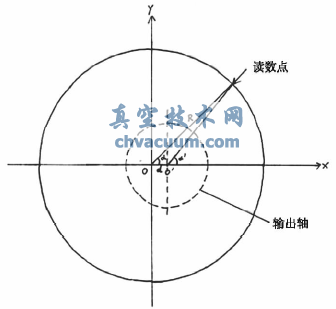
�D1 ���bƫ��ʾ��D
������α=α'-α����ݔ���S��ȫ�A�x�D�ǵ��`��ֵ����ʽ(1)����tg��α=tg(α'-α)�������õ���
������ʽ(2)�ă�߅�ã�
������ʽ(3)����0�r��ʽ(2)ȡ���ֵ����Rdcosα-d2=0�ó�
������ʽ(4)����ʽ(2)�ã�
�������ԡ�αmax=d/R������ȫ�A�x�돽R��֪��100mm����d=1mm�r����αmax≈0.6°���@���`��ͱ��^���ˡ��ټ����x���r�˵�ҕ���ȫ�A�x��y���ͱ��^�ֲ��ˡ�
2�����a���ķN��x��
���������z�yԭ�������a���ɷ֞��Wʽ����ʽ���Б�ʽ�����ʽ��������̶ȷ�������̖ݔ����ʽ���֞�����ʽ���a���ͽ^��ʽ���a����
������늄ӈ��ЙC���Ĝyԇԇ��У�Ҫ��늄ӈ��ЙC�����ܭh���ض�-25�桫70��;�Cе����l��10��150Hz��λ�Ʒ�ֵ0.15mm�����ٶȷ�ֵ20m/s2�ȇ���l�������ھ��a�����x�ã����ͬ���܉���סͬ�ӵėl�������Ҝy�����Ȳ�����Ӱ푡�
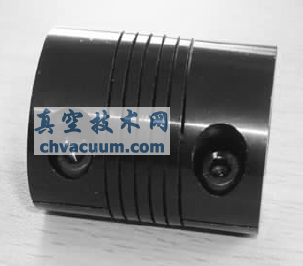
������N���a�����ɝM������Ҫ�C�Ͽ��]�ɱ����أ��x���˴ž��a�����ž��a����������;��a����ȣ����и��l���Ժã�푑��ٶȿ�;�o���|λ�Â��п������������ښ��׃����Ȑ��ӭh����;����١�ʹ�É����L;�Y�����Ρ����_���������ɿ��Ըߡ�

�D2 ����a��
�D3 �S��
��������Ŀǰ�^�鳣�õ�AS5040оƬ�ž��a�����OӋ����yԇϵ�y�����ȣ�ͨ�^�S����ݔ���S�ʹž��a���ӣ��ž��a����ݔ�����}�_ͨ�^�ɼ����ɼ�����ͨ�^��Labview̓�M�x�������̎�����ќy���Y���@ʾ������
3���Y�Z
����ͨ�^�������M����늄ӈ��ЙC���Ĝyԇ�������Ć��}�͵��Խ�Q������������Ӡ�B�µĜy�����˿ɿ��ı��C���M���˘˜ʵ�Ҫ��





