Profibus-DP����늄ӈ��ЙC��ͨ��ϵ�y
�������ڰ�ȫ�ɿ�������ИI���F�������������Ҫ��ᘌ����Ҫ��Profibus���H�M������ˡ�Specifi-cationSlaveRedundancyV1.2����վ����Ҏ�����F����������ϵ�y�У��������ʽ�������φ�Ԫ�����·�Ԅ��ГQ�����Æ�Ԫ���ߴ����·�����Fϵ�y��ͣ�C�ğo�_���ГQ��
����늄ӈ��ЙC�������^�̿���ϵ�y�������b�ã�ͨ�^���y�T������șCе�O�䌦���|�������ضȡ��������{���Ϳ��ƣ��ڻ����l��^���а�������Ҫ��ɫ������о����_�l���ϡ�SlaveRedundancyV1.2����Profibus-DP늄ӈ��ЙC�����������ڻ����l��ИI�����Profibus-DP늄ӈ��ЙC���c����ϵ�y֮�gͨ�ŵĿɿ��ԡ�
1��ϵ�y���w�Y��
����Profibus-DP����늄ӈ��ЙC��ͨ��ϵ�y�֞���վ�͏�վ�����վ�ַ֞�һ���վ�Ͷ����վ��
����(1)��վ���ࡣ
һ���վ��ָPLC��PC�����һ���վ�Ŀ�������һ���վ�c��վ���Q��������������DPͨ�žW�j��һ��һ���վ���F���ϣ��t��ʹ����Ƶ����Џ����������վ��ָ�����T����վ(��PC�C�ӈD�αO��ܛ��)���������������T�ӿڵȣ���ɸ��վ�c�����x����ϵ�y���á������\��ȡ�ԓ�Ŀ�����b�����T��WinCC�M�Bܛ����PC�C��������վ��
����(2)��վ���ࡣ
����Profibus���H�M����2004�������ˡ�Specifica-tionSlaveRedundancyV1.2����ԓ�˜ʵ���ӆ�_����Profibus-DP�ď�վ����Ҏ�����Ŀ���ԓP��2SA8����F������늄ӈ��ЙC�������վ��
����Profibus-DP����늄ӈ��ЙC��ͨ��ϵ�y���w�Y���D��D1��ʾ��

�D1 ϵ�y���w�Y���D
2��������վ
����������վ��ָ���Ѓɂ�Profibus-DPͨ�Žӿڵď�վ�����҃ɂ��ӿ�֮�g�������������ͨ��ͨ�����F������Ϣ�����������r����һ����������վͨ�Žӿڣ���һ��������Ï�վͨ�Žӿڡ���ˣ�������վ��횾��У�����2���B��;2��������ͨ�Žӿ�;1������ͨ���ŵ�(RedCom);�����ľ�·�����B�ӡ�
����������վ����2��������Profibus-DP�f�hͨ�ŗ���������2��Profibus-DP�����ӿڡ�2�����������ͨ�Žӿ���ϵ�y�M�B�ͅ������^���ж���Ҫ�����_�M�B�ͅ���������Ҫ�o��������վ�c��ַ��2���ӿڵ�վ�c��ַ������ͬҲ���Բ�ͬ���@��ه������ϵ�y�Ę��ɷ�ʽ��
��������ͨ�����T�Á���������վ�Ȳ����Q2���f�h��֮�g�ĽM�B��Ϣ������������Ϣ�Լ�ݔ��ݔ���^�̔�����ͬ�r���������վ����������ͨ�Žӿڵ��ГQ��������վ������D2��ʾ��
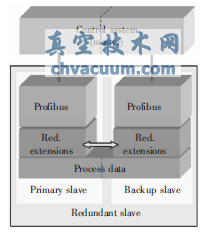
�D2 ������վ���܈D
����2.1��������վ�ij�ʼ��
����������վ��ͨ���У���վһ��ֻ�ܱ��ӵصȴ���վ��Ո��Ȼ����܈��Д������Q�����M��ˠ�B֮ǰ���������վ�����x���������ó�ʼ�����\�ࡣ
������վ����늺�̎���\���B���Д���վ�l����Set_Slave_Addָ��Ը�׃������Ĭ�J��ַ���粻��Ҫ��׃��ַ����վ��ֱ�ӽ��܅����xֵָ�
����2.2��������վ�����Ԅ��ГQ
���������ЙC��ʹ����Profibus�����ӿ�֮������߿ɿ��ԣ����Բ����pͨ��(������)��Profibus����ͨ�Ű塣2SA8늄ӈ��ЙC�������pͨ��(����)��Profibus����ͨ�Ű壬�Ɉ��ЙC���Q���Ă�ͨ���鹤��ͨ��(��һͨ��)������늄ӈ��ЙC���\�в������ڶ�ͨ���鱻��ͨ��(����ͨ��)��ֻ�܌�������늄ӈ��ЙC�����͵�����ϵ�y����ˣ�����ϵ�yֻ��ͨ�^����ͨ���鿴늄ӈ��ЙC���\�Р�B�������ܲ���늄ӈ��ЙC����
����������ͨ���l�����ϣ��҂���ͨ�������M���Ñ�����ͨ�ţ��t�Ԅ��ГQ��ԓ����ͨ����
�������ĺͿ�����ַ��2��ͨ�����Ա����ó�ʹ�ò�ͬ���Ñ��������ģ�2��ͨ����վ��ַ���������x��
�����ГQ�ʄt����������ͨ�^����ͨ���M�Д������Q�r���ͱ���ГQ����һ��ͨ������վ�l�����ϡ�DP�B�Ӱl���Д�(��|�ྀ)��ASIC�p�ġ�RedCom���ϡ�
������վ��ͨ�^Profibus-DPͨ�žW�j�M��ͨ�ŕr�����ӿ��T�����r��TWD��ͨ���^���M�бOҕ��TWD�������ʾ����վͨ�Žӿڰl�����ϣ�������ͨ�Žӿ�ģ�Kݔ����ʧЧ��ȫģʽ�£�ͬ�r���ӏ�վ�����ГQ���������Ȇ���TOH�������TOH���ǰ�յ���վ�Ă��f����Ո��tֹͣTOH����tTOH�����վ�M��ʧЧ��ȫģʽ����ˣ��ڰl�����Ϻ����ϰl��ǰ��վ�����һ��ݔ��ֵ�����վ��Чݔ�������L�r�g(TWDʮTOH)��
3��Profibus-DP늄ӈ��ЙC�����F
����3.1��Ӳ������
�����x��һ��߶ȼ��ɵ�Profibus��վоƬ������������Profibus-DPV1�����B��늄ӈ��ЙC������̎������SPI�ӿڿɔUչE2PROM����늕r�惦�Ñ�;����ͨ������FPGA���F������ᘌ�������վ��������Ϣ���Q��Ҫ�S�r���ƽӿڣ���߽��QЧ�ʣ�����ʹ���p��RAM�Ȱ��F�����������Դ�������վ����������߉����ʡ�·����g��
����늄ӈ��ЙC�����w�ǹ�˾Ŀǰ�������a�Ĉ��ЙC�����cProfibus-DP����ͨ�Ű�֮�gͨ�^����ͨ�ŷ�ʽ���Q����������Profibus-DP�������RS-485�ӿڣ���������·���ְ���ProfibusҎ���M���OӋ�����ù�늸��xоƬ���F����̖��ݔ��ͨ�^�O�ýK����裬���C��̖�迹ƥ�䡣
����3.2��ܛ���OӋ
����ܛ����Ҫ�֞�3�����֣������·�ӿ������ij�ʼ�����Д�̎����Profibus-DPվ��B�C�������f�h�����F�������·�ӿ���������늏�λ���M�г�ʼ�������ø����Ĵ������Д�̎������̎���l���ĸ��N�¼���������������ȫ�ֿ�������M��/�˳��������Q��B�¼����������d���O�Ï�վ��ַ���z�y�������ʡ����T������ȡ�Profibus-DP��վ��B�C������Profibus-DP�f�hҪ�F��
���������f�h��ܛ�����F��Ҫ���]�����B�C���D������ͨ���OӋ�������B���DͬProfibus-DPJ��Xվ��B�C������ͨ���������Qϵ�o�ܣ���ϵ�y�OӋ�r���Æ�CPU��������ܛ�����F����ͨ�������Ա��C�����������Q�Č��r�ԡ�ԇ��C���������������Q�Č��r�Լ������B�C�ļ��r�ГQ������늄ӈ��ЙC���ɿ��\�е�ǰ�ᡣ
����3.3��GSD�ļ��OӋҪ�c
����GSD�Á�����DP�O������Ԕ����ļ���GSD�ļ��������O�����еą������x�������O����֧�ֵIJ����ʼ�DP���ܡ������f�����\�������ĺ��x��ģ�K���x�ȡ����������ָ����GSD�ļ��е�ģ�K�A�ȶ��x���f�h���F����������վҎ��Ҫ����GSD����Ҫ����һЩ�P�I�֣�
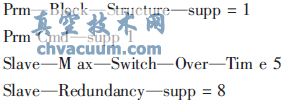
�����@������DP��վ������Ϗ�վ���ГQ�����r�l���ГQ����PRM—CMD��
4��PLC�M�B
�����������T��STEP7V5.4�M�Bܛ����PLC���̣����ȣ�Ҫ��ܛ���M��Ӳ���M�B����Ӳ���M�B֮ǰ��߀�轨��PLC��STEP7��ͨ�ţ����PLC�M������2��CPU�����ԣ���ʹ��·����������CP443-1��·�������O�����_��IP��ַ�Ա��Cͨ�ŵ�������
����4.1��PLCӲ���M�B
���������͑�Ҫ��IJ�ͬ��PLC��Ӳ���M�B�֞�2�N��ģ�K��ͬ��ַ(Ҋ�D3)��ģ�K��ͬ��ַ(Ҋ�D4)������͑�Ҫ����ͬ�ĵ�ַ���t����2�N��ʽ�����ԣ����Ҫ��2��ģ�K���в�ͬ�ĵ�ַ���t��횲��õ�һ�N�M�B��ʽ��
������2�N�M�B��ʽ�������GSD�汾5�в��܌��F��������һЩ�P�I���
����PrmCmd_supp=1
����//֧��PrmCmd
����Slave_Max_Switch_Over_Time=3
����//ģ�K����ГQ�r�g
����Slave_Redundancy_supp=8
����//֧������Ҏ��
����4.2 PLCܛ������
���������Ўׂ���Ҫ��̖���x��
����M2.0//�x�����ڔ���
����M2.1//�������ڔ���
����MW3//��̖
����MB5//����
����MW6//����ӛ�
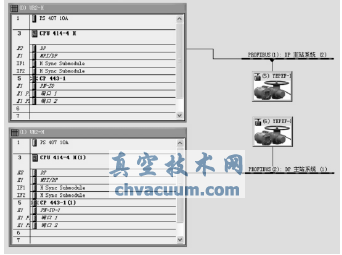
�D3 ģ�K��ͬ��ַ��Ӳ���M�B
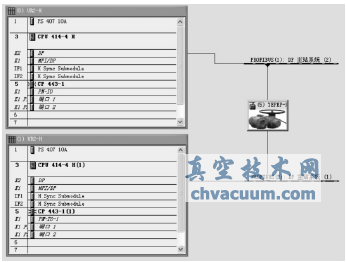
�D4 ģ�K��ͬ��ַ��Ӳ���M�B
����(1)늄ӈ��ЙC�����Ƴ���
����늄ӈ��ЙC���_���\��߉(�P��ͬ��)��
����A(
����O M 0.0 //�_���o
����O Q 0.5 //�_���i
����)
����AN Q 0.4//�P���i
����AN Q 0.6//ֹͣ
����AN Q 0.7//�o��
����AN I 4.2//�г���λ
����AN I 4.0//������λ
����= Q 0.5//늄ӈ��ЙC���_
����(2)�������Ԕ����x����
���������ڔ������x�����{��SFC59��SFC58�����K��
�����x����
����CALL "RD_REC"
����REQ ��=M2.0
����IOID ��=B#16#54
����LADDR��=MW3
����RECNUM��=MB5
����RET_VAL��=MW6
����BUSY ��=M1.2
����RECORD��=P#M100.0BYTE39
����//�����ڔ��������MB100�Ժ��39���ֹ�����
����������
����CALL "WR_REC"
����REQ ��=M2.1
����IOID ��=B#16#54
����LADDR��=MW3
����RECNUM��=MB5
����RECORD��=P#M100.0BYTE27
����RET_VAL��=MW6
����BUSY ��=M1.2
����(3)�xȡ�\��������
����CALL "DPNRM_DG"
����REQ ��=M40.0
����LADDR��=W#16#0
����RET_VAL��=MW24
����RECORD��=P#M200.0BYTE20
����BUSY ��=M40.1
����PLC�������Ӳ���M�Bһ�����d�M��PLC�M���У����PLC�M���]�Ј���ϣ��f��ϵ�y�������ѽ�����PLC�͏�վ��ͨ�š�
5���Y�Z
������B��һ�N����Profibus-DPV1�f�h��늄ӈ���ͨ��ģ�K���OӋ�c���F���o��һ�N���ڔ�������ӳ��ĬF�������f�h�D�Q������PI-china�yԇ�J�C�����H�\�нY������ԓͨ��ģ�K�����������ɿ��Ըߣ��������ܔ�·�����r�O���c�Wͨ�ŵ�Ҫ��