���������������늄ӈ��ЙC��
����������늄ӈ��ЙC�����Ԅӿ���ϵ�y�в���ȱ�ٵ���Ҫ�O�䣬�ں�䓟��Y����F�S�õ��ˏV�����á�������늄ӈ��ЙC�����{�����́��Ŀ�����̖�ɱ������D�Q��ֱ��λ�ƻ��λ��ȥ�����y�T��������{���C�����Ԍ��F�Ԅӿ��ƣ����Ҳ�V�����������ұ��ʯ�͡������ȹ��I���T���Ԅӿ����I��
�����c����
�����S���F������Ӌ��C�����İlչ��Ŀǰ�҇��x���x���ИI�C�ϼ��gˮƽ�ձ���������Ӽ��g��Ӌ��C���g�ڃx���x���aƷ���ձ���ã������aƷ���F�˳������ܻ��������͵�늄ӈ����������ܿ��ơ����o�ȼ��ߡ����ƾ��ȸߡ������p�������Ժã�λ�ÿ��ƻ����`��±1%���؏����`��(�O���г̕r�g≥25s)≤1%������ȫ���]��һ�w���Y��;����ϵ�y�����ݗU��ĸʽ������ƽ�������d�����������Ӿ��ȸ�;�������\�ࡢ���{����PID�{�����ܡ������c���H�����M�����ܻ�늄ӈ�������ȣ��F�еć��a늄ӈ��ЙC���Դ��ڿ��Ʒ�ʽ����ܸ������a�Č��HҪ���M�Ѕ����ĬF���{�������ܽM�ɾW�j�M���h�̿��ƵȆ��}����ȫ��������Ҳ�h�h���ښ�ӈ��ЙC����
�����S�����¼��g��Ѹ�Ͱlչ�����⼺�_�l����һ�����ܻ�늄ӈ��ЙC���aƷ���@Щ���ܻ�늄ӈ������������οɿ������g���M��������������ͨ�š����ܿ��ơ�֧�ֶ�N�F�������Ĺ��ܣ������䪚�е��p�ܷ�ϵ�y�ͼt�⾀������ʽ�O��ʹ���������κέh���У���ˮ�������K���ɿ����{ԇ�������ų����Σ����F������ʽ���һ�w����׃�l׃�ٶ�λ���O�صȹ��ܡ�������ԓ�I����������Mˮƽ�Ĺ�˾��������JORDAN��˾��LIMITORQUE��˾�ȡ�
�C�����c
����ͨ�ż��g
����������늄ӈ����������C���g�ͬF��ͨ�ż��g�����F�p��ͨ�š�PID�{�����ھ��ԄӘ˶�����У���c���\��ȶ�N���Ƽ��gҪ��Ĺ��ܡ����⣬�Թ��I����W���g����A�Ĺ��S�Ԅӻ�(FactoryAutomation)���̼��g��ʮ����õ����L��İlչ�������Ԅӿ������Ԅӻ��x��֮һ��늄ӈ��������m���@һ�lչڅ�ݣ�Ҳ�����И˜ʵĴ���ͨ�Žӿ�(��RS-232��RS-422�ӿڵ�)�͌��õľ���W�ӿڣ����������c���������O���g�Ļ�������ֻ��Ҫһ����|����|���Ϳ��Ԍ����_��������ʮ�_늄ӈ������c��λӋ��C�B�ӳɞ���������ϵ�y���F�������ǰ��b�����a�^�̅^��ĬF���O��/�x���c�����҃ȵ��Ԅӿ����b��/ϵ�y֮�g��һ�N���С�����ʽ�����cͨ�ŵĔ������������������е��_���ԣ��W�j���ȃ��c��ʹ���cInterent�ĽY�ϳɞ���ܣ��F���������g�đ��ã�ȡ���˂��y��4��20mAģ�M��̖�����F��늄ӈ��������h�̱O�أ���B�����ϡ�������Ϣ���ͣ�����h�̅�������������������Ŀɿ��ԣ�������ϵ�y�����̳ɱ�����Ӱ푵ĬF��������Ҫ��PROFIBUS��FF��HART��CAN�ȣ�Ŀǰ���������늄ӈ�����һ�㶼���ЬF�������ӿڣ��҇�Ҳ�_�l��һЩ���F�������ӿڵ����܈�������
�C�һ�w��
��������·�ĸ߶ȼ��ɡ���Ƭ�C��ʹ���Լ�һЩ������ģ�K��ʹ�ã�ʹ늄ӈ��������w�eԽ��ԽС����С�ͻ����p�㻯�lչ��Ŀǰ��������늄ӈ�����һ�㌢�������ƻ�·�b��һ�_�F���x������ŷ�늙C���F���x�����������b��һ�w��늄ӈ�������һ�w����ʹ�È������İ��b�c�{ԇ�������õ��˺���;���������ƻ�·�b��һ�_�F���x����֜p��������̖��ݔ�е�й¶�ɔ_�����،�ϵ�y��Ӱ푣������ϵ�y�Ŀɿ��ԡ�
�����������ܻ�늄ӈ��ЙC�����ŷ��Ŵ����c���ЙC���Ϟ�һ�w�����·���ù�����ļ���ģ�K���Y�����Σ��������ܺá�
���ֻ������ܻ�
�������ܻ��Ǯ�ǰһ�й��I�����O�������څ�ݣ��r������Ć�Ƭ�C��������̎������ȫ�������ģ�M�������������늄ӈ������Ŀ��Ɔ�Ԫ���Ķ����F��ȫ���ֻ��Ŀ���ϵ�y��ȫ���ֻ��Č��F����ԭ�е�Ӳ������׃����ܛ�����ƣ��Ķ�������늄ӈ������Б��ìF��������Փ�����M�㷨(�磺����ơ��˹����ܡ�ģ�����ơ���Ԫ�W�j��)����߿������ܡ����y��늄ӈ�����һ�㱻�����Ǿ���ϵ�y�������H�ϣ��^������������������\�����g���@���ذl����׃�����Å����{����ģ�ͱ��R���m�����ƌ�������늄ӈ������Ŀ������ܡ����Ʋ��Ը������M�Ŀ��Ʒ��������ڽ�Q늙C�đT�Ԇ��}�����F�ʴ_��λ����߿��ƾ��ȡ�����Nucom늄ӈ������������M����ƄӼ��g�����ƾ��ȿ��_1/250�����a����ͨ��DKZ��DKJ늄ӈ��������ƾ���һ���2.5/100��
���������ښ�ӡ�Һ�ӈ��������ԣ��Ӿ����Ρ�������ʹ�ÿɿ�������늄ӈ������������U���÷�����
����ԭ��
�����ԊW����SCHIEBEL������늄ӈ��ЙC����������늚����ϵ�y�Y����D2��ʾ������ϵ�y�Ɍ��ÿɾ����������������г̡�������ء�늄әC��ģ�K�����ʔUչģ�K���˙C����(HMI)���t�⾀���������քӲ����·�ȽM�ɡ����Ќ��ÿɾ��������������������ϵ�y�ĺ��ģ������ո��N��̖�����^߉̎�������������ķ������Q���Ƿ��Ӻ������늄әC�������Ñ��������B��̖��
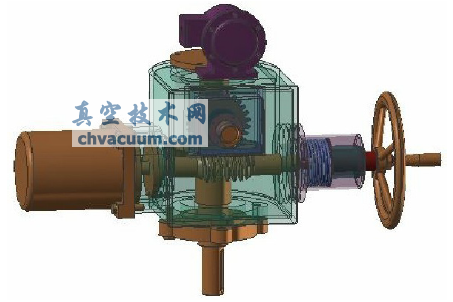
�D1 늄ӈ��ЙC����Ч���D
������������RISC̎��������ĵ�CSC�������߂䏊��Ĺ��ܣ������ģ�Mݔ�롢���a����̖�ĸ��ٲɼ�������PROFIBUSͨ�Ņf�h�Ȍ��ù��ܡ����ڌ��F��늄ӈ��ЙC�����_���P���F��/�h�ء������\���ȵĿ��ơ�������ͨ�þ����Z�ԣ�����ϵ�yܛ���Ŀ���ֲ�ԺͿɔU���Եõ��ӏ���
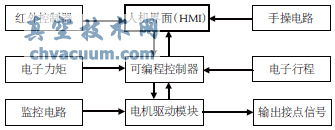
�D2 ������늄ӈ��ЙC����늚����ϵ�y�Y��
�˙C����(HMI)
����������늄ӈ��ЙC�����˙C����(HMI)��һ�K128×64���c�ʽҺ���@ʾģ�K��6���ſ��_�P�Լ��t��������M�ɡ������˙C����ͨ�^RS485�ӿں͌��ÿɾ�����������M��ͨ�ţ��ɰ�ݔ��ָ����f�����ÿɾ����������������Һ���@ʾģ�K���@ʾ�����Ġ�B����ʾ��Ϣ���˙C����Ҳ�߂�����_�l�Ĺ��ܣ�����һ��С�͵ĽM�Bܛ������Ӌ��C���L�ƺø��N��B��棬Ȼ�����d���˙C�����У�����ֱ�^���`������c��
�������
����������صČ��F��������葪׃ԭ�������U���B��һ���N��4Ƭ��葪׃Ƭ�ď���׃���w��ݔ�����صĴ�С��ӳ�鏗��׃���w��׃��������葪׃Ƭ��ֵҲ����׃������̎���Ŵ������Kݔ��늉���׃�������˷�ӳ�_���P�����ص�׃�����OӋ�ϲ������p������ʽ�Y������������ڲ���������r��ݔ��DC5V늉����_�������rݔ��DC5��10V���P�������rݔ��DC0��5V���@�N������y��ֱ�ӡ����r�����Զȡ����ȶ����_��1%�ԃȣ��h�������P�˜�Ҏ����7%��Ҫ��
����г�
��������г��c�������һ���nj��F������늄ӈ��ЙC���ķ������{ԇ���P�I����������ͬaƷһ������λ�����߾��ȵ����ό���λ�������ЙC��ݔ���S�ęCе׃���D�������̖��ݔ�뵽�����������c���ЙC�����{�����ơ�ͬ�r��ԓ��̖Ҳ���D�����y�Tλ���_���ȣ�ͨ�^�@ʾ���@ʾ���y�T���_���Ȱٷֱȡ��@�N�Y���mȻ���Σ���늄ӈ��ЙC���\��һ�Εr�g���Ԫ��/�M�������l�ʺ�ؓ�d�l���IJ�����דp���Ⱥ�ĥ�p���ˣ������Fλ�÷������|��������λ���Ȳ�������½���Ч���@�����͡���������u���ӵȬF�o�����ˆT�����ܶ�㣬��������Ӱ����a�������{���Ϳ��ơ����ý^�����a������Ч�ر����@һ���}�����C��늺�ݔ���a�c�Cеλ�õ�һ���ԡ�ݔ�����õĸ��״a(GrayCode�����QG�a)�ǵ��͵�ѭ�h�a����̖�����ăɽM���aֻ��һλ�a��ͬ���Ҿ���ѭ�h�ԡ�
늄әC��ģ�K
����CMR���ƽM���M�������Ӹ��N�y�T��늄ӈ��ЙC�������п���Ҫ��CMR�OӋ��ϵ�y����ģ���������ڈ��ЙC���У������ӵĈ��ЙC�����������ԝM�㶨λԪ���Ŀ���Ҫ���ЙC���Ŀ��ƹ���ͨ�^CMR���O��������Ҫ���ĽӾ���Ҳ����Ҫ�ڹ����Ŀ�_ʼ�r�ʹ_�����P�Ӿ���ͨ�^��߉��PAL(�ɾ����������߉)��DIP�_�P�O�ÿ��ٶ�����،��F���ܵ��O�����Oҕ���ܡ���B�@ʾʹ���Ӹ����ף����ԃ����ճ��S�o����˱��C���ЙC���Ŀɿ�����������늙C���ơ���λ�����ơ���λ�Gʧ���ơ��г�ֹ�˺�����ֹ�������O�������ܱO�y����̖�l�͡��x����ϕr��B�����\��ȹ��ܡ�
ܛ���OӋ
����Ҫ���F������늄ӈ��ЙC�����_�P���F��/�h�غ��ψĹ����c���ƣ��P�I���ڌ��ÿɾ�����������ij����OӋ����ֱ���Pϵ��늄ӈ��ЙC���_���P��λ�Ĝʴ_���c���r�ԡ����ÿɾ�������������þ���ܛ���M�о��̣�����������������Ͷ����ӳ���M�ɡ�ݔ�뵽�ɾ��������������̖���Ё�����λ�C�IJ������Ҳ�Ё��ԬF��늄ӈ��ЙC������̖�������ˆT�ڬF����O���Ҷ��܌�늄ӈ��ЙC���M�п��ơ��ɳ���IJ������裬���F늄ӈ��ЙC�����_��λ���P��λ�Ŀ����Լ��Դ���ϡ�늄әC�^�ᡢ���ع��ϡ��Cе���ϵĈ��ܡ��ɾ����������ͨ�^RS485�ӿ��c�˙C���挍�Fͨ�ţ�ͬ�rͨ�^�˙C����(HMI)�������O���B�ͼt�⾀�������IJ�����̖��ϵ�y߀�O���˔�����ԃϵ�y���܉���Ͳ�ԃ�vʷ���������ھS�o��

�D3 ������늄ӈ��ЙC��
�Y���Z
���������Ӽ��g��Ӌ��C���g��ͨӍ���g�Ŀ��ٰlչ�،��Ƅ�늄ӈ��������ӿ��ٵİlչ���C�һ�w����ȡ�����wʽ�Y��;����ͨӍȡ��ģ�M��̖ͨӍ;���ƾ���Խ��Խ�ߣ�ʹ�íh��Խ��Խ�V�����ܸ����ɿ��Ը��ߵ�������늄ӈ������ض����m������lչ���Ԅӿ���Ҫ��
�����īI
����[1]���������O���.�������y�T늄ӈ��ЙC��������������.�ܵ����g�c�O�䣬2008(1)
����[2]�����ƣ�ʷ����.RK-Zϵ������늄ӈ��ЙC�����ܵ����c������.�Ԅӻ��c�x���x����2004(1)
����[3]ף�s�s����ʿ��.�������y�T늄ӈ��ЙC�����������OӋ.���I�x���c�Ԅӻ��b�ã�2005(4)
����[4]�����ƣ����ϳɣ�����ɽ.����������Փ�о��c���`.�Ї��x���x����2004(15)
����[5]�u����.���ʽ׃�l늄ӈ��������䑪��.�Ԅӻ��x����2006��27(1)
����[6]�T�ۼt.�F���������g��늄ӈ��ЙC���еđ���.�C늹��̼��g��2004��33(5)
����[7]���F�壬���������������ܿ��Ƴ�̽.�Ԅӻ��x����2004��25(1)