RHAϵ��늄ӈ��ЙC������F�S�đ���
����RHAϵ��늄ӈ��ЙC�����ؑc���x�Ԅӻ��ɷ�����˾�������ֹ�˾���a��늄ӈ��ЙC��ϵ�ЮaƷ֮һ�����ñ鼰������ұ����������ġ�������ʯ����Ȼ�⡢�������Cе�����ȸ��I���ҹ�˾���F�Sʹ���˴���ԓ��̖���ЙC������Ҫ�����ڟ��L�tú���{�����L�C�L�T�{����
����RHA늄ӈ��ЙC���Ǿ�������Ψһ�����D늙C��S9������ʽ�Ĉ��ЙC�������ڲ��ÄӑB��ƽ�ⶨλ��ʽ���ȿ����ڸ߾��ȵ��B�m�{�����ƣ�Ҳ�����ھ����^���D�Q�l�ʵ���λ���ƺ��h���b��;�Cе���Ӳ���ȫ�X���Ӽ��g���CеЧ�ʸ��_80%���ϣ�������ͬaƷ���f��ʽ��2-3�������c��
1���O�了��
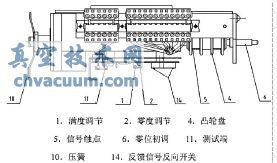
����RHA���ЙC���������в������p��������݆���ŷ�늙C��λ�ðl�������ŷ��Ŵ����岿�ֽM�ɡ���D1��ʾ��
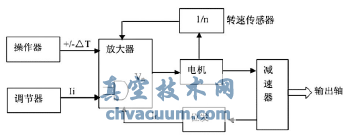
�D1 ���ЙC�����C����ԭ��D
����1.1���p����
�����p�������ø߾��ȡ���Ч�ʵĶ༉ƽ�X݆���ӣ����ͳ�֝��������ŷ�늙C�ĸ��D�١�С�����D�Q����D�١���Ť�أ���ݔ���Sݔ����
����1.2����݆
������݆ݔ����ò���pݔ��ϵ�y����ʹ�ڎ�늗l���²���Ҳ�ǰ�ȫ�ġ�
�������Դ���ϕr��늙C�Ƅ����Ԅ�ጷţ��iס늙C�D�S���t��݆�S�X݆�Ͳ���X݆���X�ϣ��˕r������݆��߅��ֹ�����t��������݆�{��ݔ���Sλ��(ֻ�Ю�늙C���Ƅ��l�iס�r�M����݆��������Ч)��
����1.3���ŷ�늙C
�����ŷ�늙C����IEC34Ҏ����S9������ʽ�����L�ڶ��D��
����늙C�Ѓɂ�6�O���Q�����@�M��������ʽ�ஔ�چ������ʽ늙C������\ʽ�D�Ӿ����������ԣ���ʹ늙C�������ٶȷ����ȵĹ����Ǻ㶨�ģ������a���^�ᡣ��ˣ�늙C�Ƿ����D�ģ�����Ҫ�c��λ���D�����P���Д��_�P��늙C��������Ҋ�D2��
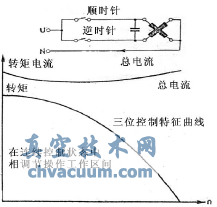
�D2 �ŷ�늙C��������
����1.4��λ�ðl����
����λ�ðl�����������B�m��λ���Ƶķ�����̖�b�ã���4��20mAֱ����̖ݔ���c�D�dzɱ���������ԭ����ͨ�^һ���Ԅ��D�Q�b��ʹ�ӸܗU�����D�\���D׃��ֱ���\�ӣ���ͨ�^���׃�����ͷŴ��·����ֱ���\���D׃���cλ�Ʊ����������̖��
����1.5���ŷ��Ŵ���
�����ŷ��Ŵ�������λ�÷����h���ٶȷ����h���p�h���ƣ��c���ЙC������һ������P���Ե�λ����ƽ��ϵ�y��
�������У����ЙC����λ�ƺ��{����̖�ɱ������{����̖�c���ЙC����λ�÷�����̖�ڷŴ�����ݔ���·�M�б��^�����ֵ��̖��Y�D�Q��Ɍ��ŷ�늙C��늉��M�п��Ƶ��}�_�����F����늙C�������{��;ͬ�r�����ŷ��Ŵ������������ٶȷ����h�����F���ЙC���ӑB��ƽ��Ŀ��ٶ�λ��������������Ҋ�D3��
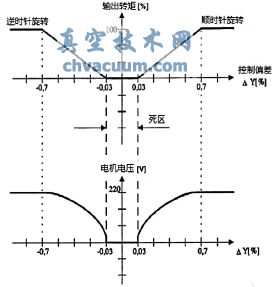
�D3 ���ЙC��������������
2�����ЙC�����bע�����
�������ȑ������ЙC���o���ڷ����D�����_���ϡ����b�r�����ú��m�ľo����˨�̾o����ֹ�Ʉӡ�
�����eע�ⰲ�b��ɺ������ЙC�����̎�������Q��ͨ�������Է�ֹ���ЙC���\�Юa���ăȉ����ܷ�ēp�������п��܈��ЙC�������������q��B��ֱ�Ӱ��b�ڽK�˱��{���C����(�y�T��)���p���B�әC���Ă����`������߿��ƾ��ȡ�
����������_���b����ô���ЙC���c�K�˱��{���C���������\�ӕ��l��׃�������x���bҲ������ܗU���b��׃���������P�]�����Ď��ʡ���D4��ʾ��
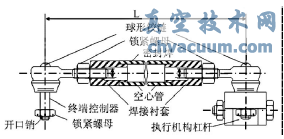
�D4 ���h�ܗU�B�Ӱ��b�D
�������ЙC���ڸߜحh���¹����r����횲�ȡ�������A����ʩ���ⳬ�^�����ضȣ����磬�ڈ��ЙC���Ĺ̶��_���ω|��һ�ӱ��o���x���һ���m�ķ��o�塣
�������ЙC���İ��b�׳ߴ缰�F�����w��r�����ЙC���������c�O��������λ���ϣ�ע����ЙC��ݔ�����c�y�T����ͬһƽ��ȣ�����С��10�ȣ����С��3�ȣ��ܗU�c�B�U֮�g�ĽǶ��ڈ��ЙC�����_�K�c�r��횲�С��20�ȡ��þ��ߜy���O��о�S�c���ЙC��ݔ���S�����ľ࣬�_���B�U�Ĵ���L�ȣ������B�U�c���νg机�����һ�𣬌��B�U���L���{�����y�����õ��L�ȡ�
3���{ԇ����
����(1)λ���{�����ù��ߴ��_λ�l�֣����_�Ŵ����̽Ӿ���36�˺�35�ˣ�ʹ��̎���քӠ�B��ͨ늺��M����λ�{�����u�Ӝp������݆��ʹ�÷Ŵ������ֲٹ���(�ɽ����̽ӽ�ͨ����36-34(+��Y)�����36-33(-��Y))�����p����ݔ�����\�е���λ�����{��λ�l�S6(�M�д��{)���ӽ�4mA��Ȼ���{���{���λ��2��ʹλ�l��“+”��“-”��ݔ��4±0.03mA(���f�ñ��O�y)���˕r�Ŵ���22�c23�ˑ���4mA���ҡ��Mλ�{�����u�Ӝp������݆ʹ�÷Ŵ������ֲٹ��܌��p����ݔ�����\�е��Mλ���˕r���ݔ������������t���܄�S2�ķ����_�P�����{����λ��Ȼ���{�������λ��1ʹλ�l��“+”��“-”��ݔ��20±0.03mA(���f�ñ��O�y)���˕r�Ŵ���22�c23�ˑ���20mA���ҡ������{�������M��ֱ���ʴ_��ֹ��Ҋ�D5��
�D5 “S2”λ�l
����(2)����̖�{���M�����²������ڷŴ�����29�˺�30��֮�gݔ��4��20mA��ֱ����̖��늄ӈ��ЙC��������λ���Mλ֮�g�����\�D�����^��22���c23�ˑ���4��20mA��֮�g׃�������ϔ����������������»ص��2�M���{ԇ��Ҋ�D6��
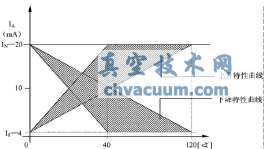
�D6 λ�ðl����4-20mA����������
����(3)�ڼ���̖�{ԇ�^���У����ЙC���\�ӷ����c��̖ݔ�뷽���෴���҈��ЙC��������̖���ƣ��t�Ŵ����ĵ�10�˺͵�12�˽Ӿ����{�Q����늙C+Y��-Y�@�M���{�Q��
����(4)�ڼ���̖�{ԇ�^���У����ЙC���_��ƽ���c�r�a���������ʎ���t�Ŵ����ĵ�27�˺͵�28�ˑ��{�Q����߀���p��ʎ���t�{�������λ����ֱ���\���c�@ʾ��ȫ������ֹ��
4���S�oҎ��
����(1)��Ҏ�S�o
�����z���ݼy�B�ӵ��ɾo
�����z���Ƅ�����늴ž�Ȧ��������ö̕r��̖±Y�{����������� ��늙C�Ƅ����l��“�δ�δ�”��������t�������{���Ƅ����Ě�϶��
����(2)늙C�ľS�o
����һ����r�£�ֻ�茦�Ƅ����M���{������ֻ������λ���Ʋ����£����茦�Ƅ����M���{����
����(3)λ�l���{��
����λ�lͨ�^�X�P�������c���ЙC��ݔ���S���B��С���{���������ɣ�ʹ֮�c�X�P�Y�Ͼo�ܡ�
5�����Ϸ������ų�
����(1)������݆��ȫ�г̃��ӎ��K�˿������Ĉ��ЙC�����\�����y�f���Cе���ڹ��ϣ���t������늚���ϡ�
����(2)��̎��Cе���ϕr�����_�������ͽK�˿��������B�ӣ��z��p������
����(3)����̖Դ늄Ӳ������ЙC��������������������z��늙C���ƺͼ����@�M��������@����ֵ����������ٙz��늙C�c��݆���X�ς����X݆�Ƿ�p��;�粻����늙C�����@�M�p�ġ�
����(4)����̖Դ늄Ӳ������ЙC����������������\�����y���z���·���ƺͷŴ�塣
����(5)����̖Դ늄Ӳ������ЙC������������������o������̖ݔ�������f�ñ�y��λ�l����̖ݔ���ˣ��o�����̖ݔ���t�f��λ�l��p�ġ�
6��ע�����
����(1)������Ӿ����z��ɱ����ϣ��_���Ӿ������_�ԡ�
����(2)ݔ�����c�B�ӗU����С�A�Ǒ�����20�ȡ�
����(3)�Ŵ����c�{����֮�g�ľ��x����400�ף��Ŵ����c�p�����ľ��x����250�ס�
����(4)���Ӿ���ᔣ���������ᔺ�λ�l����ᔑ��Q�o��
����(5)�ڲ�����Ҫ�eע�ⰲȫ���ڎ����r�Q���������|���Ŵ����ĸ��Ӿ����ӣ�����l���|늂����¹ʡ�
����(6)�{����늄ӈ��ЙC������ʹ�õ��քӲ���������o�ɽ��cݔ����
����(7)�ӵؾ���횿ɿ��ӵء�
7���Y���Z
�����ҏSʹ���˲��և��aDKJ�͈�����������þ��w�ܼ��g������ݔ�����Բ��ˮ�������ܲ�·�彛�����ģ���̖���ɔ_������S�o���������^������Q��RHA���������O��������@�½����S�o�ˆT�Ĺ���������Ȝp�١�����˿���Ʒ�|���_�������a�\���ܿء�
�����īI
����[1]�Z��÷��������.ұ�I�Ԅӻ��x���c�����b��[J].�Ї�ұ���O�f��.
����[2]�ؑc���x�������ֹ�˾.RHA늄�늄ӈ��ЙC���aƷʹ���f��.





