���ڶ�̎�������y�T늄�(d��ng)�b�ÿ�����
1������
�����y�T늄�(d��ng)�b���ǹ��I(y��)�Ԅ�(d��ng)��ϵ�y(t��ng)�еĈ�(zh��)�І�Ԫ,�V����(y��ng)���ڻ�����ʯ�͡�ұ��������ИI(y��)�ĉ������ضȡ��������ơ�����һ�N�C(j��)�һ�w���ĬF(xi��n)��(ch��ng)�O(sh��)��,��늄�(d��ng)�C(j��)�����(d��ng)��Դ,��������̖(h��o)�D(zhu��n)�Q������(y��ng)�ęC(j��)е��(d��ng)�����Ƹ���y�T�_�����P(gu��n)�]���S���ƌW(xu��)���g(sh��)�İl(f��)չ,�e�ǔ�(sh��)�ֺ���Ϣ���g(sh��)�İl(f��)չ,�y�T늄�(d��ng)�b�õ��Ϸ�����ϵ�y(t��ng)��(sh��)�ֻ�����Ϣ���̶�Խ��(l��i)Խ��,��(du��)늄�(d��ng)�b�õľ��ȡ���(d��ng)�B(t��i)���Ժ��ܵȷ����Ҫ��ҲԽ��(l��i)Խ��,���Ѻõ��˙C(j��)���桢���_��λ�������\��Ϳ���ͨӍ�ȵ�,�@Щ���ܵ���ߺ��ܵČ�(sh��)�F(xi��n)��ه���y�T늄�(d��ng)�b�ÿ�������
2������ԭ��
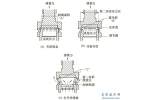
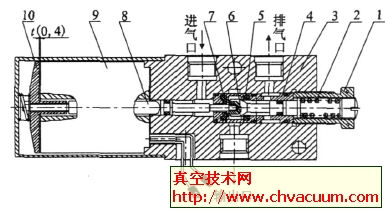
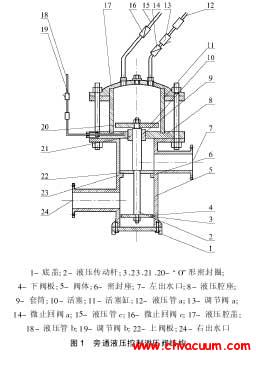
�����y�T늄�(d��ng)�b��(�D1)�����������Ϸ�����ϵ�y(t��ng)ָ��,����늄�(d��ng)�b��늙C(j��)�\(y��n)��,�(q��)��(d��ng)늄�(d��ng)�b�Â���(d��ng)���ֹ���,�����乤����B(t��i)��̖(h��o)�����o�Ϸ�ϵ�y(t��ng),�Ķ���(sh��)�F(xi��n)�y�Tλ�ÿ��ơ��y�T늄�(d��ng)�b�ÿ�������Ƕ��ʽ����ϵ�y(t��ng),���Ԇ�Ƭ̎����(MCU)�����,����˙C(j��)���桢��̖(h��o)ݔ��/ݔ����늙C(j��)�(q��)��(d��ng)����������·,ͨ�^(gu��)MCU ��(n��i)�������������(g��)ϵ�y(t��ng)�\(y��n)�С�����MCU������(g��)ϵ�y(t��ng)�ĺ���,MCU оƬ�ϼ�����һ��(g��)���ܺ�(ji��n)����Ӌ(j��)��C(j��)ϵ�y(t��ng)(CPU,��(n��i)��,���п���,ݔ��/ݔ���ӿڵ�) ,�����w�eС�����ĵ͡����ƹ���(qi��ng)���U(ku��)չ�`��ͻ���ʹ�÷���ȃ�(y��u)�c(di��n),�����y�T늄�(d��ng)�b�ÿ������ϏV�����á�
�D1���y�T늄�(d��ng)�b��
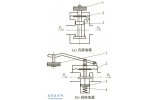
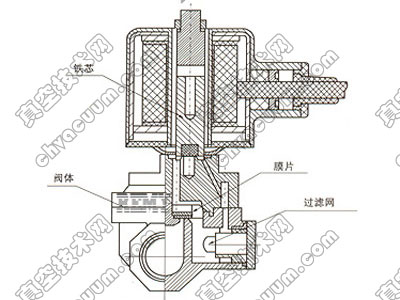
����Ŀǰ��������MCU����ܛ���ձ����ǰ/���_(t��i)������ʽ(�D2) ��ϵ�y(t��ng)��(y��ng)�ó�����һ��(g��)�o(w��)��ѭ�h(hu��n)��ѭ�h(hu��n)���{(di��o)������(y��ng)�ĺ���(sh��)�������(y��ng)����,�@�����Ǻ��_(t��i)�О顣�Д����(w��)����̎�������¼�,�@������ǰ�_(t��i)�О顣һ�㌦(du��)��(sh��)�r(sh��)��Ҫ��ߵIJ�������ͨ�^(gu��)�Д����(w��)��(l��i)���C�ġ���?y��n)��Д���?w��)�ṩ����ϢһֱҪ�ȵ����_(t��i)�����\(y��n)�е�ԓ̎�r(sh��)���ܵõ�̎��,�����΄�(w��)��푑�(y��ng)�r(sh��)�gȡ�Q������(g��)����ѭ�h(hu��n)�Ĉ�(zh��)�Еr(sh��)�g��
�D2��ǰ/���_(t��i)ϵ�y(t��ng)
3�����چ�(w��n)�}����Q����
3.1�����چ�(w��n)�}
�����S���y�T늄�(d��ng)�b�ù��ܵ����Ӻ����ܵ����,Ҫ��MCUͬ�r(sh��)̎�����΄�(w��)��(sh��)��Խ��(l��i)Խ��,��(du��)��(sh��)�r(sh��)��Ҫ��ߵ��΄�(w��)ҲԽ��(l��i)Խ��,�΄�(w��)��(sh��)����������ζ������ѭ�h(hu��n)�r(sh��)�g�ļ��L(zh��ng),����(sh��)�r(sh��)��Ҫ��߄t��(du��)���_(t��i)�����ѭ�h(hu��n)����������^��Ҫ�����ϵ�y(t��ng)���_(t��i)�����ѭ�h(hu��n)�r(sh��)�g���^(gu��)��̎�팍(sh��)�r(sh��)�΄�(w��)������g���r(sh��)�g,ϵ�y(t��ng)�Č�(sh��)�r(sh��)�Ծ͵ò�����Ч���C,������Ҳ�Ͳ���������(w��n)��������
3.2����Q����
��������ģ�K���O(sh��)Ӌ(j��)����,���y�T늄�(d��ng)�b�ÿ��Ʒֽ�ɶ���(g��)����ģ�K,ÿ��(g��)��(du��)��(sh��)�r(sh��)��Ҫ����߳����(zh��)�Еr(sh��)�g�^�L(zh��ng)�ĵĹ���ģ�K���Ъ�(d��)����MCU����,Ȼ��ͨ�^(gu��)����ͨӍ�ķ�ʽ�c����MCU�M(j��n)�Д�(sh��)��(j��)���Q,����MCU��ϵ�y(t��ng)�ܘ�(g��u)��