�����řC(j��)��(g��u)��Ք�·����(d��ng)�B(t��i)�����c��(sh��)�(y��n)
���������о���·���֡����l�^(gu��)�̵Ą�(d��ng)�B(t��i)���ԣ��P��ᘌ�(du��)һ�_(t��i)�����Ųل�(d��ng)�C(j��)��(g��u)����Ք�·��������̓�M�әC(j��)���g(sh��)�����˔�·���Ą�(d��ng)���W(xu��)ģ�ͣ��ƌ�(d��o)��ģ�̈́�(d��ng)���^(gu��)�����M����\(y��n)��(d��ng)���̼�늴ŷ��̣���(du��)��Ք�·���ķ��l�����l��(d��ng)�B(t��i)�^(gu��)���M(j��n)�з�������c��(sh��)�(y��n)��(du��)�ȡ�����͌�(sh��)�(y��n)�Y(ji��)��������ģ�͵Ą�(d��ng)�B(t��i)���ԝM���·���ļ��g(sh��)����(sh��)����(sh��)�(y��n)��(sh��)��(j��)��Ҫ���о���·���ă�(y��u)���O(sh��)Ӌ(j��)�����\���ṩ������(j��)��
��������
������·�������ϵ�y(t��ng)������ƺͱ��o(h��)���õ���Ҫ�O(sh��)�䣬�乤�����܌�(du��)늾W(w��ng)�Ŀɿ��\(y��n)�о�����Ҫ��Ӱ푡�Ŀǰ�ڇ�(gu��)��(n��i)��һ�N늴Ųل�(d��ng)�������ֵ����řC(j��)��(g��u)�яV����(y��ng)������Ք�·���I(l��ng)���c���y(t��ng)�ل�(d��ng)�C(j��)��(g��u)��ȣ����řC(j��)��(g��u)���нY(ji��)��(g��u)��(ji��n)�Ρ���(ji��)�ܺ߿ɿ��Ե�ͻ����(y��u)�c(di��n)��Ȼ�������řC(j��)��(g��u)�Ą�(d��ng)�B(t��i)�^(gu��)�̱��^��(f��)�s�����HҪ�о��֡����l�^(gu��)�����\(y��n)��(d��ng)�����ęC(j��)е����׃����߀Ҫ���]�C(j��)��(g��u)��늴���������Ȧ�����ϵ�y(t��ng)��朵ȅ���֮�g�Ą�(d��ng)�B(t��i)����P(gu��n)ϵ����ˣ��������řC(j��)��(g��u)�Ą�(d��ng)�B(t��i)���Ԍ�(du��)���о���·���������ܺ����늾W(w��ng)��(w��n)���Ծ�����Ҫ�����x��
����̓�M�әC(j��)���g(sh��)�ǻ��ڶ��wϵ�\(y��n)��(d��ng)�W(xu��)�c��(d��ng)���W(xu��)��ģ��Փ�����M(j��n)�ж��I(l��ng)�����ľC�ϑ�(y��ng)�ü��g(sh��)��ͨ�^(gu��)��̓�M�h(hu��n)���н�����ȫ����(sh��)���Ĕ�·��ģ�ͣ���(du��)ģ���M(j��n)�Є�(d��ng)�B(t��i)���棬���ԫ@�Ô�·���\(y��n)��(d��ng)������ͬ�r(sh��)�̵�λ�á��ٶȵȅ������Ķ�ֱ�^����(zh��n)�_�ķ�����·���Ą�(d��ng)�B(t��i)���ԡ�������̓�M�әC(j��)��(d��ng)�B(t��i)���漼�g(sh��)��(l��i)�A(y��)�y(c��)��·���ل�(d��ng)�C(j��)��(g��u)�Ĺ��ϡ����U����̓�M�әC(j��)���g(sh��)�ڔ�·���Ą�(d��ng)�B(t��i)�����Լ��O(sh��)Ӌ(j��)�I(l��ng)���еđ�(y��ng)�á�
�����P����һ�_(t��i)��η�(w��n)�B(t��i)���řC(j��)��(g��u)����Ք�·�����о���(du��)����̓�M�әC(j��)���g(sh��)�����˔�·��ģ�ͣ���(du��)��·���ķ֡����l��(d��ng)�B(t��i)�^(gu��)���M(j��n)�з������������(du��)�әC(j��)�M(j��n)�Ќ�(sh��)�(y��n)�Ա��C����Y(ji��)���Ĝ�(zh��n)�_�ԺͿ����ԡ�
����1����·��ģ�͵Ľ����c�\(y��n)��(d��ng)�^(gu��)�̷���
����1.1����Ք�·��ģ�͵Ľ���
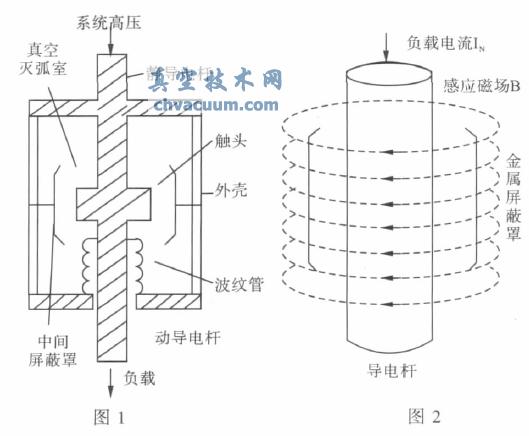
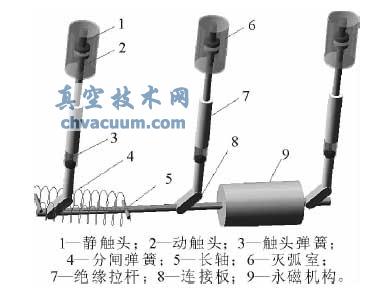
�������еķ��挦(du��)���ZW45-12 �͑�����Ք�·������·�����w�������O֧��ʽ�Y(ji��)��(g��u)���_(k��i)�P(gu��n)���w���õ��������řC(j��)��(g��u)����Ք�·������·������Ҫ���g(sh��)����(sh��)Ҋ(ji��n)��1��
��1 ��·������Ҫ���g(sh��)����(sh��)

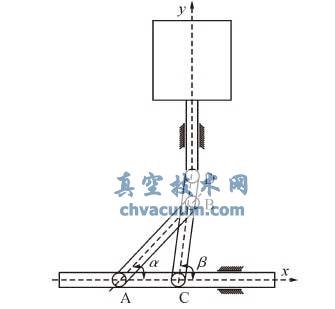
�����P�߲��ö��w��(d��ng)���W(xu��)����ܛ��ADAMS �����Ĕ�·��ģ��Ҋ(ji��n)�D1������ʹ������ģ���ܜ�(zh��n)�_�M(j��n)�Є�(d��ng)�B(t��i)���棬����ڸ���(g��)����֮�g���Ռ�(sh��)�H������r���Ӽs���P(gu��n)ϵ���d�ɡ���·����(d��ng)���r(sh��)���L(zh��ng)�S��(c��)��ˮƽ�\(y��n)��(d��ng)����Ҫ����ˮƽ�����Ƹ�����(d��ng)�|�^��(c��)���Qֱ�\(y��n)��(d��ng)���������Qֱ�����Ƹ���
�D1 ZW45-12 ����Ք�·���ķ���ģ��
�����L(zh��ng)�S�c�B�Ӱ塢�B�Ӱ��c�^�����U֮�gҪ�������D(zhu��n)�����ڌ�(sh��)�H�����Д�·���\(y��n)��(d��ng)����֮�g����Ħ������Ҫ���\(y��n)��(d��ng)���϶��xĦ���������⣬�m��(d��ng)�����|�^���ɵ��A(y��)�������Ա�������_(k��i)ʼ�r(sh��)����?y��n)�C(j��)��(g��u)������(d��o)��(d��ng)�|�^���s�|�^���ɻ���ĬF(xi��n)��·��ģ�ͽ����ɹ���߀��Ҫͨ�^(gu��)�Ď�ģ�ͅ���(sh��)������Ħ�������x�����w�����M(j��n)�d�ɺ���(sh��)�c���x���Ƶȷ������M(j��n)�әC(j��)ģ�ͣ�����M(j��n)�Ѓ�(y��u)���O(sh��)Ӌ(j��)��ֱ���õ��A(y��)�ڵĔ�·��ģ�͡����Ќ�(du��)��·���әC(j��)�M(j��n)�н�ģ�̓�(y��u)�������̈DҊ(ji��n)�D2��
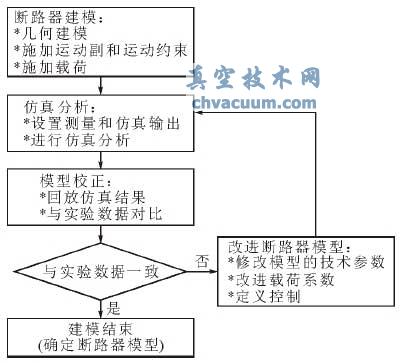
�D2 ��ģ���̈D
����1.2����·��ģ�͵��\(y��n)��(d��ng)�^(gu��)�̷���
������(du��)��ԓģ�Ͷ��ԣ������řC(j��)��(g��u)�к��l��Ȧͨ늮a(ch��n)���ň�(ch��ng)�c���ô��F�ň�(ch��ng)�B�Ӯa(ch��n)����늴������Լ����l���������Ĺ�ͬ�����£���(d��ng)�F�Ą�(d��ng)����ֱ���(q��)��(d��ng)����(d��ng)�C(j��)��(g��u)���L(zh��ng)�S��ˮƽ�\(y��n)��(d��ng)���B�Ӱ匢�L(zh��ng)�S��ˮƽ�\(y��n)��(d��ng)�D(zhu��n)����^�����U���Qֱ�\(y��n)��(d��ng)���Ķ�����(d��ng)��(d��ng)�|�^����(d��ng)������(sh��)�F(xi��n)��·���ķ֡����l��������·���ĺ��lλ�������ô��F���֣����lλ���ɷ��l���ɱ��֡���?y��n)�?d��ng)�|�^��(c��)�Ą�(d��ng)��ֱ�����L(zh��ng)�S�Ƅ�(d��ng)�B�Ӱ��(l��i)�(q��)��(d��ng)���_(k��i)�P(gu��n)�ڹ����r(sh��)��Ҫ���\(y��n)��(d��ng)�����٣����g�D(zhu��n)�Q���B�ӵęC(j��)��(g��u)Ҳ���٣��C(j��)��(g��u)���\(y��n)��(d��ng)�^(gu��)�̺�(ji��n)�Σ����кܸߵĿɿ��ԡ����н�����Ք�·��ģ�͵��\(y��n)��(d��ng)��(ji��n)�DҊ(ji��n)�D3��
�D3 ģ�͵��\(y��n)��(d��ng)��(ji��n)�D
����4���Y(ji��)�Z(y��)
�����P����̓�M�әC(j��)���g(sh��)����һ�_(t��i)ZW45-12 �����řC(j��)��(g��u)������Ք�·����ģ�͡��ƌ�(d��o)��ģ�ͷ֡����l�^(gu��)�̵Ą�(d��ng)�B(t��i)���̣�����õ���·���֡����l�^(gu��)�̵Ą�(d��ng)�B(t��i)����������������Y(ji��)���c��(sh��)�(y��n)��(sh��)��(j��)��(du��)�ȷ������ó����½Y(ji��)Փ��
������·��ģ�͵ķ֡����l��(d��ng)�B(t��i)���Կ����_(d��)����·����Ҫ���g(sh��)����(sh��)��Ҫ��; ����ģ�͵ĺ��l�r(sh��)�g��54.6 ms���c��(sh��)�(y��n)��(sh��)��(j��)һ�£���(d��ng)�|�^���l�����r(sh��)�g��1.5 ms�����U�ĺ��l������ֵ��0.36 mm����С�ڌ�(sh��)�(y��n)��(sh��)��(j��);����ģ�͵ķ��l�r(sh��)�g��39.7 ms�����U�ķ��l�^(gu��)�_��1.45 mm���c��(sh��)�(y��n)��(sh��)��(j��)һ��;ͨ�^(gu��)��(sh��)�(y��n)�(y��n)�C�˷���Y(ji��)���Ĝ�(zh��n)�_�ԣ������̓�M�әC(j��)���g(sh��)�о���·���Ĺ����\��̓�(y��u)���O(sh��)Ӌ(j��)�ṩ������(j��)��