�����Ք�·��ģ�K�����Ծ��Դ�OӋ
���������Ք�·��ģ�K�����ڶ������Ք�·�����Դ�ɿ��Ժ͵�������˸��ߵ�Ҫ����M���˹����Ք�·��ģ�K�����Ծ��Դģ�K�OӋ���������Ծ��Դ�Ĺ���ԭ���������OӋ����ȡ�늴ŸБ���Ȧ(ȡ�CT)�ĽY������������ģ�K���·�Y���������x�ͣ��D׃������ʽ�Ƚ����乤���r�p�ġ����������řC���ل���ݳ�������ģ�ͣ������õ��͓p�ĵ�����gЪ���Ʋ��ԡ��M�������ܿ����������OӋ�����F���ھ����Ŀ��Ʋ��Ժ��x�����߹�����ʽ�����ͨ�^ԇ���C���������ȡ�CT ����������200 A~3 000 A���M���ھ��Ծ��Դģ�K���������w�Ծ��Դ���������r�p��������300 mW���M��늾Wͣ�3 �ܣ��Ծ��Դϵ�y�����ӹ����Ք�·���������OӋ���Ծ��Դ�M��ϵ�y����·���Ŀɿ��Ժ������Ե�Ҫ��
��������
������Ք�·�������������绡���^�����|��Ϩ�����������w�eС�������p��ʹ�É����L���o��ı�ըΣ�U������Ⱦ�h������ˏV���������Љ��I��������Փ���늉��c�g϶�L���g���Ч�����Δ������_�P�o�������ڸ���늉��ȼ������������_�P���ԏ��a�@һȱ�c��
�����������ѽ����������Ք�·���Ąӡ��o�B�^�����Լ��ӑB�������}�о����꣬����ͨ�^����“�������c”������ʽyӋ�����������p��ڼ����������_�P���o�B�����yӋ�ֲ�ģ�ͣ��ó��������՜绡�ҵē������ʱȆΔ����՜绡�Ҹ��ͣ���ͨ�^ԇ���C�����ķ�������C�˾�������������Ք�·���o�ӑB����Ч�������ķ������p�������_�P�_���C���c�P�I���ء�
�������y�Ķ��������_�P���õ��ǂ��y�لәC���������ل�ϵ�y�ĭh����.��Ӌ�\�ӹ�������푑��������ɿ��ԲЧ�ʵͣ�����ڵĄ���ͬ�����^����ܝM��������Ք�·����ͬ���ԺͿɿ��Ե�Ҫ��������˻���ģ�K�������g���ɵĶ������Ք�·�����F���ԣ��������řC���لӣ����w���x���ƣ�ģ�K���λ�لӣ���ɢ��С���ɿ��Ըߣ��w�eС�����ڴ��������y�ď��ɲلәC������220 V ����늿���늴ŲلәC��Ó�ۡ����ŲلәC�����Դ��Ҫ��վ��ֱ���Դ��������M����늳ػ����늳أ��팦�ϡ����l��Ȧ���[10]�����@Щ�Դ�OӋ���ǵ��λ�Դ��늣���K�Դ����220 V ��늹�늣����ڹ����Ք�·��ģ�K̎�ڸ��λ���Ծ��Դģ�K���ø߉�ĸ�����ȡ늣���Q�˸��λ��늆��}�������Ք�·��ģ�K�������ȡ��c��늳�������Ϟ�������ϵ�y���ع�늣��������ȡ늴���Ԫ���ķǾ���������ȡ늹���������ȡ늹��ʣ�������Ҫ�������Ք�·��ģ�K�����Ծ��Դģ�K�M���о����M���ھ���늺��x���L�r�g�S�ֹ�늵�Ҫ��
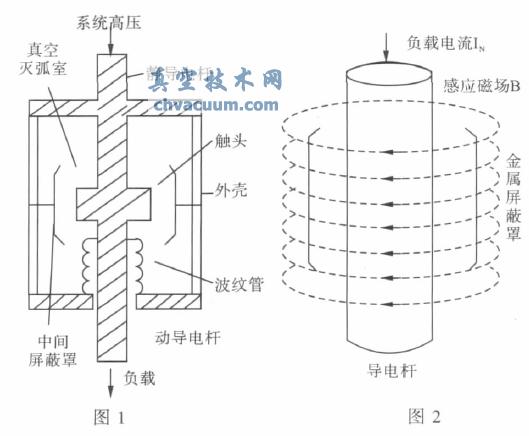
�������Č��Դģ�K��늴ŸБ���Ȧ�����M���˃����OӋ���ԫ@ȡ�����Ĺ���������ݔ�����ʡ�ͨ�^�ل���������ģ�K�·�Y���������x�ͣ���׃������ʽ�ȣ������乤���p�ġ����������řC���ل���ݳ�������ģ�ͣ������õ��͓p�ĵ�����gЪ���Ʋ��ԡ��ĵ��ĺ����ܻ��ɷ��������M�п������OӋ���ԝM������Ք�·��ģ�K���ɿ��Ժ����ܻ���Ҫ��
����1�������Ք�·��ģ�K�Ծ��Դ����ԭ��
���������Ք�·��ģ�K(FCVIM)������՜绡�ң����ŲلәC�����Ծ��Դģ�K���ɡ������Ք�·��ģ�Kϵ�y��D��D1 ��ʾ�����řC���ӌ�늗U�c��՜绡�҄��|�^��늗Uֱ�����B��늴ŸБ���Ȧ(ȡ�CT)�ĸ߉�ĸ��ȡ���Ȟ���늳س�늣�Ȼ����늳�ͨ�^��ݳ��ģ�K��لәC����ݳ�늣��ڶ���ڴ��r�����������Ք�·��ģ�K̎�ڸ��λ��ÿ��ģ�K�Ą����͠�B�z�y���Ծ��Դģ�K�����ܿ�����ͨ�^���w�c���λ�����������F���ƺ�ͨ�š�
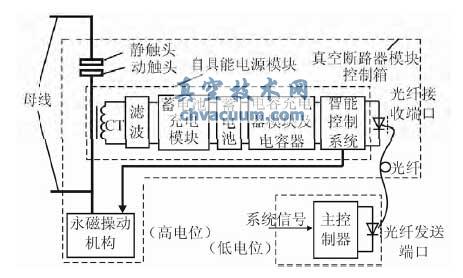
�D1 �����Ք�·��ģ�Kϵ�y��D
�������˝M������Ք�·��ģ�K���B�m�ɿ��ĵع�����һ���棬ȡ�CT��ԓ�бM������ȡ늹���������ȡ늹��ʣ����OӋ��CTȡ늷���5%~120%ĸ�������ȡ늹���10 W ���ҡ���һ������Ҫ�����Ծ��Դģ�K�Ŀ��d�p�ġ��@�ӿ��Դ_���ھ�ĸ������^С��ȡ늹����^С�ĕr�܉�M��ģ�K���������x���z��ͣ늕r��������늳س��m���Cģ�K�����ĕr�g�����Cϵ�y�ɿ���
����6���YՓ
����1)ȡ�cCT ��С�����r���M��ͅ^���ֹ������^��ͅ^��ݔ��늉���׃���أ��м�塣ͨ�^���ô��V��늸�50 mH ���є�50 ��ϵõ��M��ĸ���~�����2 500 A ��5%~120%׃���r��ݔ��늉��M���Ծ��Դģ�K������
����2)�������gЪ������ʽ�£���������Ŀ��ƵĔ��W�����������Ã����㷨���õ�����gЪ���Ʋ��ԣ����������ܿ��������F��ԓ���Ŀ��������ԡ�
����3)ͨ�^ԇ�yԇ�����Ծ��Դģ�K���d�p�Ľ���300 mW ���£��M��늾Wͣ�3 �ܕr�����C�����������������C�ɿ���ͨ�^��ԇ���C������ڹ����Ք�·��ģ�K���ɵĶ������Ք�·���đ����ṩ�˱��ϡ�