�Ͽ������V��������Ք�·����նȜy���еđ���
�������y����՜绡����նȜy������ֻ��һ������նȷ����Ȝy�������^�ߣ����������ɔ_�����˫@�Üʴ_����ն�������ʹ�ÙM�ň��}�_�ſط����M���������λ���y����նȣ������Ͽ������V�������y�������M���ںϡ�������՜绡�ҵ��x���z�y��ʽ����ն�׃����Ҏ�ɴ_�����Ͽ������V���ij�ʼֵ��ϵ����ꇡ�����C���@�N�����������õ����e�ԣ��܉���Ч�����ⲿ�����y��ϵ�y�ĸɔ_����ߜy�������ķ����Ժ͜ʴ_�ȡ�
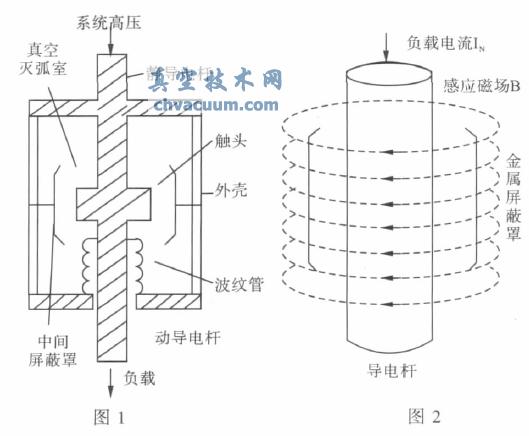
�����S���҇����ϵ�y�o�ͻ�����������ʩ������O�����켼�g���w�ٰlչ����Ք�·����ʹ����څ�ռ�����Ք�·�������w�eС�������p���h����ȾС;�_�������绡���ܺ�;�m���l���������ɿ��Ըߣ�늉����L�ȃ��c����6~35kV늉��ȼ���·����ռ��������λ��߀�������늉�(72.5kV����)����늉�(380V~3kV)�ɘO�lչ����Ք�·�������������^���͜绡�ֶεĔ�·������ն�ֱ��Ӱ푔�·�������ܡ�Ŀǰ�^�錍�õ���նȜy�������ǙM�ň��}�_�ſط����M���������λ���������x���z�y�������y�����ڹ��������
������·������նȣ�ֻ���ڶ��ڙz�ޕr�y�������@�ɷN�y������ֻ��һ������նȷ����Ȝy�������^�ߣ��}�_�ſط�늷��܉�y���Ĝ绡����նȵ����̷�����10-1~10-4 Pa�����������λ��ֻ������ն�̎��10-1~1Pa�r�y�������_��ͬ�r������Ք�·����̎�Ĵň���늈��h�����^���ӣ���һ���������ܕ������ϻ�ɔ_���y�����ʴ_�������ö�����������ͨ�^�����ںϵķ����Ѳ�ͬ�NĂ��������ṩ���^�y�����ԾC�ϣ�������������������֮�g���ܴ��ڵ�ì�ܣ����Ͳ��_���ԣ��Ķ��@����նȜʴ_�Ġ�B��Ӌ������O���B�z�yϵ�y���ϵĜʴ_�ԡ�
�������õĔ������Ĕ����ںϷ����л��ھ�ֵ���f���ں��㷨��С�����������������V�������ȡ��������V������������f�w̎���㷨���ܸ����y���Y�����r�Ԅ��{���V����ϵ��������ںϾ��ȡ������y�������V�������ں����䲻��ĵط���������һ�����������F������ɔ�����Ϣ�e�`�r������K�����ںϽY��Ӱ��^��Ҳ����ϵ�y���������^��Ͽ������V�����a���������㣬������Ϣ����ԭ�����ܼ��r��Ч�ؙz�y�������Ĺ��ϣ��Mһ�����ϵ�y�Ŀ��w���ܡ�
�����������Ͽ������V���㷨����A���õ��˶�������������ںϔ�����ԓ�������ԫ@�ñȂ��y�ĆΪ�һ�N��նȜy����������Ч�����ɿ��Ĕ������������նșz�y�ľ��ȡ�
1��ԭ���cģ�͵Ľ���
�����Ͽ������V����һ�N����ķ�ɢʽ�������V�������֞�ֲ��V���������V�����ɲ��֡�ÿ���������Ĝy��ֵֻ�ṩ�o�����ľֲ��V���������ֲ��V��������̎�����@�ý����ھֲ��y�����A�ϵľֲ����Ӌ���@Щ�ֲ����Ӌֵ�������V�������M���Mһ�����ں�̎�����Ķ��@�ý��������Мy��ֵ���A�ϵ�ȫ�����Ӌ��Ȼ�����V����������Ϣ�����ֵ���ֲ��V�����M�з������ã���߾ֲ��V�����ľ��ȡ����IJ��ÙM�ň��}�_�ſط����������λ���y����՜绡�ҵ���նȣ�֮����DSPF2812����̖�M�вɼ����ں�̎�����Ͽ������V�����ĽY����D1��ʾ��
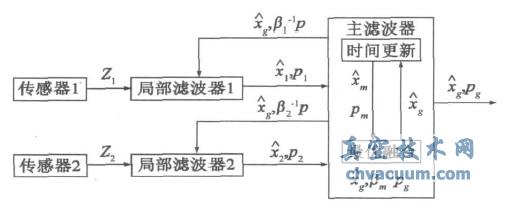
�D1 �Ͽ������V�����ĽY��
�����˿�ADCINB0�Ĕ�����[1.450��1.900]�ķ����Ȳ��ӣ��ڵ�2500Ls���ң��y���������F�������ӡ�ԓ�M����ƽ��ֵ��1.663V�������0.0380���y�������o�Ք�څ�ݣ���������ص�Ӱ��^��ԓ�M�����鿨�����V����̎�����늉�ֵ���ڌ���_ʼ�A�Δ��������^���������^�������y��������[1.450��1.900]�ķ��������S�������^�m�M�У��������Ք�څ�����@��������2500Ls������Ч�������˔����Į������ӡ�̎����Ĕ���ƽ��ֵ��1.657V�������0.0048��������δ��̎���Ĕ�����������һ����������
�������]����նȜy���r�Ĝy��������B���o���ʴ_�@�ã����õ��Ǻ������O��Ĺ�Ӌֵ��ʹ����K���ںϔ�������һ�����ȵIJ��ӡ����ā��f�������V���������ںϷ�������Ч����ߔ�����һ���ԣ��������h����׃�����y���Y����Ӱ푡�
4���YՓ
��������ᘌ��Ϊ�һ�N�y�������y���绡����նȲ��ʴ_�Ć��}������˲��ÃɷN��ͬ�����y������ʹ�û����Ͽ������V�����Ĕ����ںϷ��������y�������M��̎�������挍����ԓ��������Ч�ԣ��܉���Ч��Q�Ϊ�һ�N�������y����նȲ��ʴ_�Ć��}��