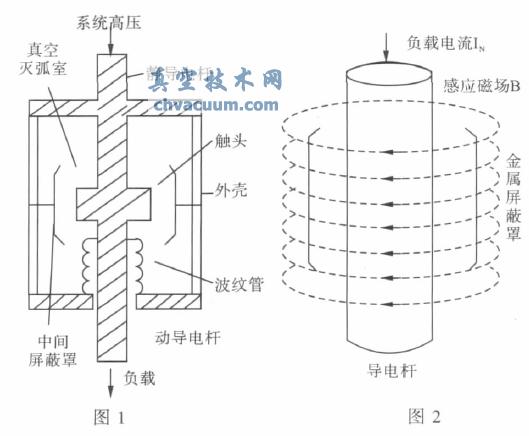
����_�P(gu��n)�|�^��(d��ng)�B(t��i)λ�Ùz�y(c��)�о�
��������_�P(gu��n)늻��ΑB(t��i)����׃��Ҏ(gu��)�Ɍ�(du��)����_�P(gu��n)�_������������ҪӰ푣����|�^��(d��ng)�B(t��i)�_���С��Ӱ�늻��ΑB(t��i)׃����Ҫ���أ���Μ�(zh��n)�_�z�y(c��)�|�^��(d��ng)�B(t��i)λ�ÏĶ�Ӌ(j��)���|�^��(d��ng)�B(t��i)�_�������Ҫ�����x������_�P(gu��n)늻��D��Ҷȷֲ�������ȼ����늻��Ҷ�ֵ�ߡ��|�^�Ҷ�ֵ�ͣ�����늻�ȼ���ΑB(t��i)����׃���������Ƽs��늻��D�����|�^λ�õľ��_�z�y(c��)�����������һ�N�µ�����_�P(gu��n)늻��D���|�^λ�Ùz�y(c��)�㷨��ԓ�㷨����(sh��)�ֈD��̎�����g(sh��)�\(y��n)�õ�����_�P(gu��n)늻��D������У��ڶ�ֵ��늻��D���зքe�z�y(c��)늻����ϡ���߅������z�y(c��)�����ϡ���߅���M(j��n)��ֱ���M�ϣ���(sh��)�F(xi��n)�˄�(d��ng)���o�|�^�ڈD����λ�õĸ߾��șz�y(c��)����(sh��)�(y��n)�Y(ji��)�������� ���㷨�܉���Ч�ؙz�y(c��)��늻��D����ϡ���߅������ͨ�^Ӌ(j��)��õ�늻��D�����o�|�^����(d��ng)�|�^��λ�á�
�����S����(gu��)�ҽ�(j��ng)��(j��)Ѹ�ٰl(f��)չ�����I(y��)���r(n��ng)�I(y��)���������������(qi��ng)��ʹ���҇�(gu��)��늾W(w��ng)Ҏ(gu��)ģ��������늉��ȼ�(j��)����ߣ��S֮��(du��)���ϵ�y(t��ng)�Ŀ��ƺͱ��o(h��)�O(sh��)��Ҳ����˸��ߵ�Ҫ������_�P(gu��n)�����ϵ�y(t��ng)����Ҫ���ƺͱ��o(h��)�O(sh��)�䣬��Y(ji��)��(g��u)�O(sh��)Ӌ(j��)�ă�(y��u)�����ɿ��Ե����ʹ�É��������L(zh��ng)�ȷ����о����ˌW(xu��)�߂��P(gu��n)ע�ğ��c(di��n)�����@Щ���c(di��n)���}�У����ܵĿɿ��Ե��P(gu��n)�I���}��������{(di��o)��늻���Ϩ��ʹ������_�P(gu��n)�܉���Чͨ�ࣻʹ�É��������һ��(g��)��Ҫ���}����η�ֹ늻����ی�(du��)�|�^��������Ɖģ��������_�P(gu��n)늻��ΑB(t��i)���Ե��о������P(gu��n)�I���}��Ŀǰ������_�P(gu��n)늻��ΑB(t��i)���о����ǻ��ڸ��ٔz��C(j��)CMOS(Complementary Metal Oxide Semiconductor) ��CCD(Charge Coupled Devices)�Ĕz��늻�ȼ�������ЈD�������ÈD��̎�����g(sh��)�����ЈD������ȡ�P(gu��n)�I��Ϣ�ķ��������ٔz��C(j��)CMOS ��CCD ���g(sh��)�IJ����M(j��n)������늻��ΑB(t��i)�о�����(ji��n)��(sh��)��Ӳ�����A(ch��)��Ҳʹ�û���늻��D���늻��ΑB(t��i)�о����˟��c(di��n)����ȡ�����S�T�о��ɹ���
��������_�P(gu��n)늻�ȼ����һ��(g��)��(f��)�s�������^�̣�����_�P(gu��n)��늅���(sh��)���C(j��)е����(sh��)���Ņ���(sh��)�ȶ�����(du��)늻��ΑB(t��i)�a(ch��n)��Ӱ푡�Ŀǰ��(gu��)��(n��i)��W(xu��)�߂�ᘌ�(du��)����_�P(gu��n)��늅���(sh��)( ����늉����) ���Ņ���(sh��)( �|�^�Ŀv�ň�(ch��ng))��(du��)늻��ΑB(t��i)Ӱ푷��������^��������о������ڙC(j��)е����(sh��)��(du��)늻��ΑB(t��i)���о�����߀��Ƿȱ����(gu��)��(n��i)����܊�ķ��漰��(sh��)�(y��n)�ĽǶȷքe�о���늘O�g����(du��)늻��ΑB(t��i)��Ӱ푣� �������|�^���o�B(t��i)�_�ࡢ��(d��ng)�B(t��i)�_��Ȏׂ�(g��)�Ƕȷ���������_�P(gu��n)�ęC(j��)е���ԣ�������Ҳ�ᵽ���Â��������y(c��)�����|�^��(d��ng)�B(t��i)�_�����^���`���(du��)�ھ��_����늻������Dz����ġ���(gu��)��Schulman M B ��������l�^���У��S���|�^λ��׃��늻��ΑB(t��i)��(hu��)�ɼ������D(zhu��n)׃?y��u)�U(ku��)ɢ�ͣ�������늻���(hu��)��(d��o)���|�^�ğ��g�����ϣ�����l�^���бM���_(d��)���U(ku��)ɢ��늻��_����⼯����늻�����ˣ���ռ��g(sh��)�W(w��ng)(http://smsksx.com/)�J(r��n)�������늻��D�����R(sh��)�e��(d��ng)�|�^λ�á�Ӌ(j��)���|�^��(d��ng)�B(t��i)�_�࣬��(sh��)�F(xi��n)�|�^��(d��ng)�B(t��i)�_���c늻��ΑB(t��i)�Ĕ�(sh��)���������������x�ġ��㷨�_�l(f��)�^���аl(f��)�F(xi��n)�����y(t��ng)�Ĕ�(sh��)�ֈD��Ŀ��(bi��o)�z�y(c��)�㷨�o������늻��D�����|�^λ�õęz�y(c��)��
�������Ļ�������_�P(gu��n)늻�ȼ�����ЈD�z�y(c��)늻����ϡ���߅��������(du��)߅���z�y(c��)�Y(ji��)���M(j��n)��ֱ���M��Ӌ(j��)�����(d��ng)���o�|�^��λ�ã�����m(x��)�|�^�_����(du��)늻��ΑB(t��i)Ӱ푵��о����»��A(ch��)��
Ŀ��(bi��o)�z�y(c��)�㷨
�����D��̎���ķ������g(sh��)��Ҫ�������ׂ�(g��)���棺�D���A(y��)̎�����\(y��n)��(d��ng)Ŀ��(bi��o)�Ԅ�(d��ng)�z�y(c��)���\(y��n)��(d��ng)Ŀ��(bi��o)��ۙ���\(y��n)��(d��ng)Ŀ��(bi��o)����Լ��\(y��n)��(d��ng)Ŀ��(bi��o)��λ�ȡ��\(y��n)��(d��ng)Ŀ��(bi��o)�z�y(c��)̎�ڈD��̎������ӣ��Ǻ��m(x��)���N��(j��)̎����Ŀ��(bi��o)����О�����ȵĻ��A(ch��)��Ŀǰ���\(y��n)��(d��ng)Ŀ��(bi��o)�z�y(c��)�㷨��Ҫ�У������������g��ַ���������ַ���ģ��ƥ�䷨��������ȡ��������(du��)�ճ��ĈD������_�P(gu��n)늻���D1��ȼ���r(sh��)�����������c(di��n)��늻��D��Ҷȷֲ�������늻����ֻҶ�ֵ�����ȸߣ����������ֻҶ�ֵС���ȵͣ������S��늻�ȼ���ΑB(t��i)��׃��ͬһ�����c(di��n)���g�Ҷ�ֵҲ��(hu��)�l(f��)������׃����늻�ȼ���^���Е�(hu��)���F(xi��n)Һ�·��R��ʹ���|�^�D��^(q��)��Ҳ��(hu��)���F(xi��n)늻�Ӱ�� 늻����Π�׃��Ī�y(c��)�]��Ҏ(gu��)���ԣ��������c(di��n)���������Һ��y�ڎ��g��������c(di��n)��ƥ�䣻늻��D����|(zh��)���ܴ�̶���ȡ�Q�ڸ����Ĕz���C(j��)�ķֱ��ʡ����������f���������|�^λ�ûҶ�ֵ�^�ͣ��o���������c�|�^Ŀ��(bi��o)�ָͬ�r(sh��)�Ҷ�ֵ����׃��ʹ�ßo���ڎ��g��(du��)�|�^�����M(j��n)��ƥ������M(j��n)���|�^��ģ��ƥ�䣬���ĔzӲ���ֱ��ʵ͵���r��Ҳ�o���M(j��n)���|�^�������z�y(c��)��
�����C������������늻��D��������ԣ��\(y��n)�ìF(xi��n)�е�Ŀ��(bi��o)�z�y(c��)�㷨�o����늻��D����ֱ�әz�y(c��)�|�^λ�á�����늻��D��l(f��)�F(xi��n)��늻��D����ϡ���߅���քe���o�|�^�̈́�(d��ng)�|�^��λ�ã��Ķ�����ͨ�^�z�y(c��)늻��ϡ���߅���ķ����z�y(c��)�|�^λ�ã�������ֱ�ӏĈD���Йz�y(c��)�|�^λ�õ��y�}��
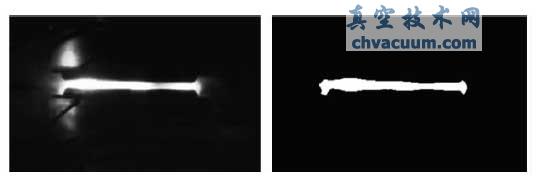
�D1 ��ɫ늻��D���D2 늻���ֵ���D��
�Y(ji��)Փ
�������ñ����㷨̎��늻��D�քe�چΎ�늻��D�������늻��D���Йz�y(c��)��(d��ng)���o�|�^λ�á���(j��ng)�^��Ό�(sh��)�(y��n)�z�y(c��)�l(f��)�F(xi��n)��
����(1) ������_�P(gu��n)늻��D���У�늻�����߅����λ�ü��քe���o�|�^����(d��ng)�|�^��λ�á�
����(2) 늻��ϡ��ɗl߅�����������е�ֱ������ԭ����Ҫ�Ѓɂ�(g��)����һ������ȼ����늻��w�R�����|�^�g϶�����(c��)��ʹ���|�^߅���D���ܵ�������늻���Ӱ푶�������ֱ�����ڶ����|�^Ƭ�ֲ��ܵ�늻��ğ��g���ö����F(xi��n)���ڬF(xi��n)��Ҳʹ��늻��D����늻�����߅������ֱ����
����(3) ����ֱ���M�ϵķ������Ɍ����z�y(c��)�����ϡ���߅���M�Ϟ�ֱ�����M�Ϻ�ֱ����λ���ܸ���(zh��n)�_�ؘ�(bi��o)ʾ�|�^��λ�á�
����(4) ������_�P(gu��n)늻����ЈD���У���?y��n)��o�|�^���oֹ�ģ�ֻ��z�y(c��)һ��늻���߅����λ�ü��z�y(c��)�����o�|�^��λ�á���ÿ���D����xȡ�����ЈD���зքe�z�y(c��)늻���߅����λ�ã��͌�(sh��)�F(xi��n)�����ЈD���Є�(d��ng)�|�^λ�õĸ�ۙ��