����ProfiBus��늄ӈ���������ϵ�y�о�
������B�˾���ProfiBus�F�������ӿڵ�늄ӈ���������ϵ�y���_�l�^�̡��ڱ���ԭ���������ܵĻ��A��,������ProfiBusͨ��ģ�K,�o����ܛӲ�����F�����Լ��������̈D��ԓ늄ӈ���������ϵ�y֧�ֽM�Bܛ���Ľ��벢���F�c�����F�������aƷ�Ļ��B����������
�����F��������һ�N�_��ʽ�����ֻ������cͨ�ŵĵӿ��ƾW�j����һ헼�Ƕ��ʽ��Ӌ��C������ͨ�š��W�j���g��һ�w�ľC�ϼ��g��Ŀǰ�������ϴ�������ʮ�N�������g�����У�ProfiBus���������������g�Ĵ���ռ�����ஔһ�����Ј���
�����S���F�������Iˮƽ����ߣ��F�е�늄ӈ���������ϵ�y�ڹ��ܺ�ʹ���ϵ�ȱ�c��¶��Խ��Խ���@����ģ�M��������̖���ȵ������ܸɔ_��ȱ�ټ��r���h�̈C�ƺ���̎����ʽ�����ֻ��̶Ȳ��ߣ�ģ�M�����_�P�����ƹ����ܼs���B�Ӿ��Ĕ����Ȇ��}�����H�����ˮaƷ�ɱ���Ҳ������ϵ�y�����ď��s�ԡ����ˏ��a�F��늄ӈ���������ϵ�y�IJ���֮̎����������ƹ��ܣ����İ�ProfiBus�F���������g������늄ӈ���������ϵ�y��
1������ϵ�yӲ���OӋ
����������ϵ�y��Ҫ������¹��ܣ�����늄ӈ��������ƣ��Լ�����ͨ�š�����ϵ�y�Y����D1��ʾ��
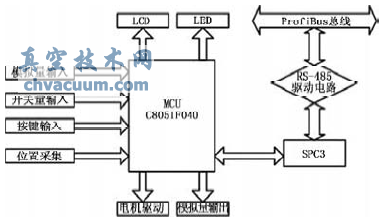
�D1 ����ϵ�y�Y���D
1.1�����������Ɔ�Ԫ�Y���OӋ
�������IJ���C8051F040�������ϵ�y��MCU�����Ⱥ�CIP-51��CPU�Ⱥˣ�����MCS-51ָ�������64kBƬ��Flash����惦����4kRAM��128B�ķ���ʧ�Դ惦����C8051F040��Ƭ���YԴ�S�������Ӳ���·�B�Ӻ��Σ�����Ӳ���{ԇ�����s�����OӋ�_�l���ڣ����ϵ�y�Ŀɿ��Ժͷ����ԡ�
�������������Ɔ�Ԫ�Y�������ׂ����ģ�K��λ�òɼ��·��ģ�M��ݔ���·��ģ�M��ݔ���·���h���_�P��ݔ���·�����Iݔ���·��늙C���·��LCD��LED�@ʾ�·�����У�λ�òɼ��·���F��������ǰλ�õIJɼ�;ģ�M��ݔ���·���F�h�̿�����4��20mA��̖�IJɼ����D�Q;ģ�M��ݔ���·���F��ǰ늄ӈ�����λ��ֵ��4��20mAģ�M�����D�Q;�h���_�P��ݔ���·���F�h�̿��Ơ�B�IJɼ�;���Iݔ���·ؓ؟�ɼ����ذ��I����;늙C���·������늄ӈ�����;LCD��LED�@ʾ�·���ڮ�ǰλ�á�������͵���Ϣ���@ʾ��
1.2��ProfiBusͨ���·�OӋ
����ProfiBus-DP��һ���_�ŵġ��c�����̟o�P�Ę˜ʣ��κ��˶����ԫ@���@���˜ʲ��OӋ���Ե�ProfiBus-DP�O�䡣���^ͨ�^�@�N��������DP�ӿڣ��������������ąf�h��Ҫͨ�^ܛ������ɣ�ܛ�����̹������ɿ��Բ����ܵ����ϣ�ͨ���ٶ�Ҳ�ܵ����ơ����IJ���SIEMENS��˾�ṩ��SPC3(SIEMENS ProfiBus Controller��3rd generation)ASIC�ӿ�оƬ���_�lProfiBus-DP�ӿڡ�SPC3�м�����(RS-485)�������·�ӡ�DP��վ�Ñ��ӿ��Լ����֬F����������(FMA)���c�����B��MCUֻ��Ҫ������ܛ�������Ϳ��Ԍ��FProfiBus-DP����վ��ͨ�Ź��ܣ����s����ϵ�y���_�l���ڡ�SPC3�cMCUͨ�^������ַ�����M�Д������Q�����IJ��Ô�����ַ�����÷�ʽ��SPC3��AB8��AB10�ӵأ�AB0��AB7���ո߰�λ��ַ��DB0��DB7��Ͱ�λ��ַ�c�������õĿ�����ALE��XWR��XRD���B��MCU��ALE��WR��RD������SPC3���x����SPC3�Д�Դ����һ���ⲿ�Д�XINT���|�lMCU���ⲿ�Д�INT0��ProfiBus-DP����ӽ��|�x�������p�g������оƬ����SN75LS176��SN75LS176�cSPC3�Ľӿڰ���Rxd��Txd�Ͱl��ʹ��DE����ͨ�^6N137���x��SN75LS176�Ľ���ʹ�ܶ�REֱ�ӽӵ��Ա��Cȫ�����ա����⣬���Æ�ɫLED�cSPC3��XDATAEXCH���B���Á�ָʾSPC3������B���ܴa�_�P�����O�Ï�վ��ַ��ProfiBusͨ���·�Y����D2��ʾ��
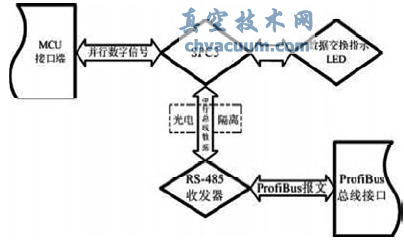
�D2 ProfiBusͨ���·�Y��
2������ϵ�yܛ���OӋ
2.1��ProfiBus�f�h�����F
����SPC3�м�����������ProfiBus-DP��B�C���ںܴ�̶��Ϝp����ProfiBus�f�h����ܛ���_�l���ڡ�SPC3�����������c��
����(1)���Ԫ���̎��ProfiBus-DPͨ�Ņf�h;
����(2)����������������SPC3�Ĺ����^�̡���оƬ�M��ͨ��֮ǰ��Ҫ����ӵ�MCU���䅢���Ĵ�������ʽ�Ĵ����M�б�Ҫ���O��;
����(3)���Ԅӽ���ProfiBus-DPͨ�ŵķ��մ�ȡ�c����ͬ�Ĉ��Č�����ͬ�ľ��_�^��
����(4)֧�ֶ����Д࣬�����Д����κ��Д�ָʾ���ܣ������Д��һ���ⲿ�Д�;
����(5)�܉��Ԅ��R�e9��6kb/s��12Mb/s���������ʡ�SPC3�ăȲ�������1��5k���p�˿�RAM����ַ��000H��5FFH���Ȳ�RAM��8�ֹ���һ����Ԫ�����֞�192���Ρ�������ϵ�y�У���SPC3����һ��MCU���ⲿRAM��ͨ�^������ַ�������M�мĴ������x�����_��MCU��SPC3�Ŀ���Ŀ�ġ�
����RAM���g�����ܷ֞�̎���������^���M�������^��DP���_�^�����^�����У�
����(1)̎���������^�Ĵ�����������վ��С���t�r�g�Ĵ������Ȳ����ɿ��T���Ĵ������Д�Ĵ����Լ���B�Ĵ����ȡ�
����(2)�M�������^�����O��DP���_�^�и������_�K���L�ȡ�ָ�(��ַ)���@Щ�L�ȡ�ָᘵ��O�ñ����SPC3�x����r����ɡ����\�Р�B�£�����Dout_Buf��Din_Buf���L�ȿ�׃���⣬������ָᘺ��L�ȶ�����׃��
����(3)DP���_�^��DP�����ľ��_�^������3��DPݔ�����_�K3��DPݔ�뾏�_�K��2���\�ྏ�_�K��2���o�����_�K���O�Å������_�K��ͨ�Žӿ����þ��_�K�ȡ�
����SPC3�܉����DP��վ��ͨ�Ź��ܣ���վ��MCUֻ��Ҫ���SPC3�ij�ʼ���Լ�̎�������đ������ġ���DPģʽ�£�SPC3�ṩ���µķ��մ�ȡ�c��
����DefaultSAP-�������Q����;
����SAP55-�O�Ï�վ��ַ(Set_Slave_Add);
����SAP56-�xDPݔ��(Read_Input);
����SAP57-�xDPݔ��(Read_Output);
����SAP58-ȫ�ֿ�������(Global_Control);
����SAP59-�x�ӿ�����(Get_Config);
����SAP60-�x��վ�\��(Slave_Diag);
����SAP61-�O����(Set_Param);
����SAP62-ͨ�Žӿ����Ùz��(Check_Config)��
����ProfiBus-DPϵ�y��վͨ�Š�B�C��D3��ʾ��
�D3 ProfiBus-DPϵ�y��վͨ�Š�B�C
����SPC3�м�����ProfiBus-DP�������f�h�Լ�DP��B�C����֧�ֲ��������������c�����B��MCUֻ��Ҫ������ܛ�������Ϳ��Ԍ��FProfiBus-DP����վ��ͨ�Ź��ܣ�������Ҫ���c���B�C��MCU�ľ��w����������
����SPC3�ij�ʼ����spc3init();
������SPC3���յĔ����M��̎����outdataincept();
������Ҫ�l�͵Ĕ�������SPC3��indatasend();
����̎�������\�࣬diagmodule();
����푑�SPC3�Д࣬dpint()interrupt0��
2.2������������
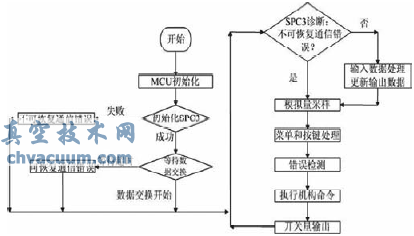
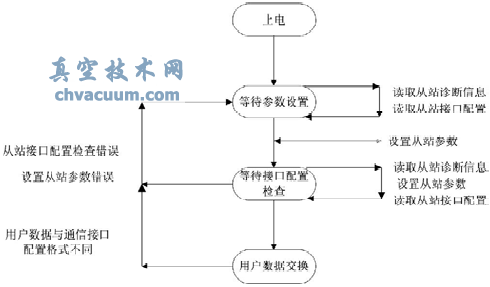
�D4 �������̈D
��������ϵ�y����������D4��ʾ�����֮��ϵ�y�����M��MCU�ij�ʼ��������ϵ�y�r犡�ADC��DAC�����r�����YԴ�����á�Ȼ��MCU�_ʼ��ʼ��SPC3�����ȴ�SPC3�M�딵�����Q������ȴ����r����SPC3�ѽ��M�딵�����Q��B���t�_ʼѭ�h������ϵ�yδ�l�����ɻ֏͵�ͨ���e�`���������M�У�SPC3�\�ࡢ̎������������ģ�M���ɼ����ˆ�̎�����e�`�z�y�����ЙC������_�P��ݔ������t�����M�п���������̎�����������ܲ����á�
3���M�W�c�yԇ
�������F���������о����ԏ�վ�_�l�����������ù������PLC������վ�O�䣬�Y������ܛ����������M�Bܛ�����������аl�ď�վ�O������վ���B���M�ɬF�������W�j���D5�鱾�Ŀ���ϵ�y�M�W�h����
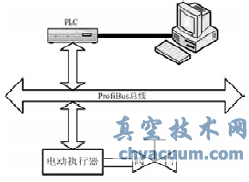
�D5 ϵ�y�M�W�h��
3.1��ProfiBus�M�W
����ProfiBus�F�������M�W�h�����Ђ�ݔ���|���O��Ӳ��^�����υf�h�˜ʣ���վ�O�����SIEMENS��S7-300ϵ��PLC�ϵ�ProfiBus-DPģ�K����վ�O��鱾����ϵ�y���ӵ�늄��y�T�����⣬�����܉�һ�����ӽ����H������r�Ĝyԇϵ�y�����İѵ������M�Bܛ��“�M�B��6��53”�cPLC�B�ӣ��_�l������һ���ıO��ܛ�����F�������ĵ����I���Ƒ��íh������ProfiBus�W�j�У�PLC��CPU�惦����׃����׃��ֱ��ӳ�����O���g��I/Oͨ�Š�B��ͨ�^“�M�B��”�cPLC��ͨ�ţ��Y����λ�C�O�ؽ��棬���Ԍ��r��ӳ�W�jͨ���Ƿ��������Լ�ֱ�^������O�ÿ�������^���y�T�������Ĺ��܌��F��r��ϵ�y�O��ϵ�y�\�н�����D6��ʾ��
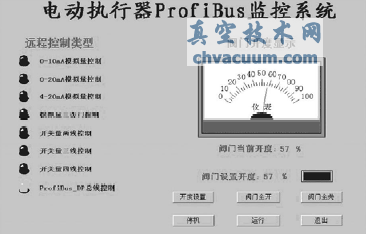
�D6 ProfiBus����ϵ�y�O�ؽ���
3.2��ϵ�y�\�Мyԇ
����ͨ�^�L�r�g���\�Мyԇ����ϵ�y�\����r���ã����r�ԡ��ɿ����܉�M�㹤�I�F�����yԇ�Y�����1��ʾ��
��1 ProfiBus�M�W�\�Мyԇ�Y��
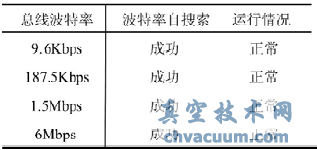
���������Ϝyԇ�Y�����Կ����������OӋ��늄ӈ���������ϵ�y�܉����_�R�eProfiBus���������ʣ�����ɿ����������Q���ܣ����F����ϵ�y�ľW�j������ϵ�y�������6Mbps�����ʵľW�j�������\�У����ڔ������^С��늄ӈ�������6Mbps���ԝM��^�������ʹ������
4���YՓ
�����������о���늄ӈ���������ϵ�y���܉����m�����������ʣ����_����ProfiBus����ϵ�y�����L�r�g�\�Пo�`����ģ�M�Ĺ��I�O�حh�����@ʾ�����õ�ʹ�����ܡ�ProfiBus�������g�����룬���������늄ӈ��������Ј��������Ͱlչǰ����