늄ӷ����y���������о�
������Bһ�N��ֱ�г����ʽ늄ӈ������������y�M�ɵ�늄ӷ����y,ԓ�y���߂�����y������Ҫ��ĸ��N����׃�Q�����Լ��y�_����̖���ܺ��քӹ��ܡ��y���_�����P�]�ٶȡ�ݔ���S���D������,ȡ�Q��늄әC���D�١����ʺ͂��әC���Ă��ӱȡ��������ɿ����������әC�����_�șz�y�C�����Y�C���c�քәC���M��,�Ɍ�ʩ�h�̲�����͵ط��ϡ�
����늄ӈ��ЙC�����Ԅӻ�ϵ�y�е�һ�N���в������ɷ֞�ֱ�г̺ͽ��г̃ɴ������տ���ϵ�y���{�����́��Ŀ�����̖����׃�ٿv׃�������O��Ҫ���D�Q��ֱ��λ�ƻ��λ�����{���y���Ķ����F�^�̿��ƻ�ϵ�y���Ԅ��{����
�����C���Ƽ��g���Cе���g�đ��ã����F/�C+�S��ϵ�y0�Y��ģʽ���C��늄ӈ��ЙC������̎���������̖���f���{��Ҏ�ɵľC�ϡ��{�������ГQ����Bָʾ����������ݔ���ȹ��ܡ�
����������һ�N���������Ϳ�������ֱ�г�늄ӈ��ЙC�����ٿv�����y�M��늄ӷ����y���ڌ��Hʹ����ȡ���^��M���Ч����
1��늄ӷ����y����ԭ��
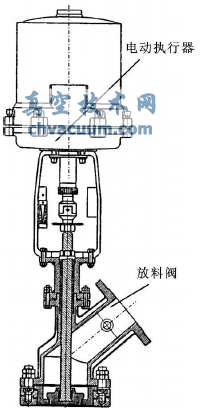
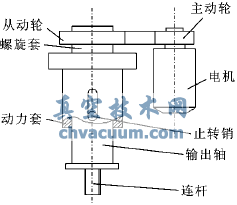
����늄ӷ����y��ֱ�г����ʽ늄ӈ������c�����y�M�ɣ�Ҋ�D1����220V����������殐��늄әC(���X݆�p��)���������Ҳ���������ڎ��_���d�������Թ�����늄әC������D����AOC�ͷ��]�h��ʽ���ஐ��늄әC��
�������ܿ�������늄ӈ������O�����ܱ���ʽ�ŷ��·�����տ���ϵ�y���{������DC4��20mA��DC1��5V��̖����A/D�D�Q����CPU�M���\��̎����ͬ�rCPU�c����늄ӈ��ЙC�����_����̖���ϡ�����λ���M�б��^����늙C�D�ӣ�ͨ�^�X݆�p�ٺ��Ƅ�ݔ���S���ϡ���λ�ƣ���K���Fݔ����̖��늄ӈ��ЙC��ݔ��λ�ƵĿ��ơ����⣬늄ӈ��ЙC��ݔ����ǰ�Č��Hλ�ý�CPU̎����D/A�D�Q���Ԙ˜ʵ�4~20mA��̖ݔ�o�Ñ���������;�������y���Y���֞���չʽ����չʽ�����\�Ӽ��y�Uͨ�^�i�o��ĸ���yо���yо�N���yо�����ܷ��B�����Cǻ����Һ��й©���y�U����늄ӈ�����ݔ���S�ϡ���λ�ƣ�ʹ�yо��ʩ�_���P�������_���Ԅӷ��ϵ�Ŀ�ġ�
�D1 늄ӷ����y�Y���D
���������yͨ���c����������ʹ�ã�һ���OӋ�yо����个���m���ܣ������������m���ڷ������ϡ�
����������a������׃�Σ������yо�c�yо���ܷⲻ��������ʧЧ�����Է����y�OӋ�����]�����m����׃�εĬF�����ˌ��yо�����ܷ����ܺ����m���ӹ��ܷ��x����D1��ʾ������Ч�ر����yо����F�����bʩ�����a����׃�Ρ�
2��늄ӈ������Y��
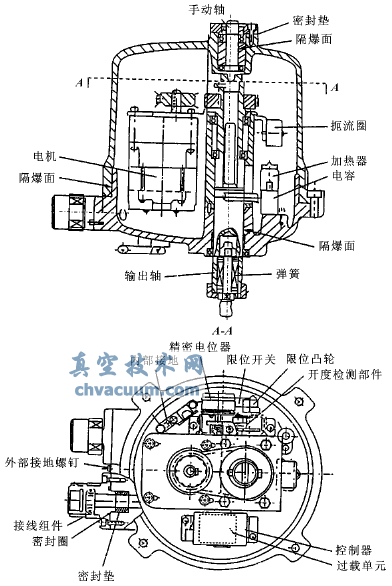
������D2ʾ��늄ӈ�������Ҫ�������Ϳ����������әC�����_�șz�y�C�����Y�C�����քәC���M�ɣ���ʩ��̖���ա��D�Q���\�㣬ָ��늄әC�\�D��ͨ�^ͬ���������������D�Q��ݔ���S�������\�ӡ��c��ͬ�r���_�șz�y�C����ݔ���Sλ�Ʒ����o�����Ϳ��������M���]�h�����^�̡��Y֧��ʹ�������ͷ����y��һ�w�������r�¿��քӡ�
�D2 늄ӈ�����
����2.1�����������әC��
�������әC����Ҫ�Ʉ����������cݔ���S�M�ɡ�늄әCͨ�^ͬ�����ӄ��������ף��׃ȱڼӹ��������ȸߡ��ݼy���������c��ˇ�����õ������ݼy������ݔ���S��ֹ�D�N�ڄ�����ֱ�����N�ۃȶ�λ�����S���������Ƅӡ�������ͨ�^�L���S�����ڄ������У��ɴˌ��F���������D�\���D�Q��ݔ���S��ֱ��λ�ƣ�Ҋ�D3��
�D3 ���������әC��
��������늄әC���S�^���d���أ�����D����늄әC�����������ؿɳ��^���Q����2.2��2.3�����]·�y�ȣ�����d�ɮa�����y�T�P�]��ĩ�ڻ��_�����ڣ�ͨ���r�g���̡��x��늄әC�˿��]�^�dϵ����
����2.2���������yλ�z�y�C��
����ݔ���Sֹ�D�N���yλ�����C������ݔ���S��ֱ���\��λ��(�yо�_��)���X�l���X݆�����o���܌�������λ��(�����X϶�a���C��)�����λ���D�Q�����̖�ٷ����o�������������Կ���ϵ�y���{������ݔ����̖���yо���_����̖֮�����r��늙C��ֹͣ���������ЙC��λ�õĽo��ֵ�c���Hֵ�ı��^������̎����������·���M�С�̎��C����ģ�K�����M�в�ͬ�ĽM�ϣ����Fָʾ�����г������ֳ̿��Ƶȹ��ܡ�
����ݔ���S��λ�ÿ�����݆���У�Ҋ�D4������B�_�P�O��/��������B0�r����ݔ����̖�����pС��3.7��3.95mA���{�����o����λ݆��ʹ��λ�_�P������ݔ���Sֹͣ�����\��;����B�_�P�O��/��������B0�r����ݔ����̖����������20.2��20.5mA���{�����o����λ݆��ʹ��λ�_�P������ݔ���Sֹͣ�����\�ӣ��Ķ����Fݔ���S����λ�õ���λ��
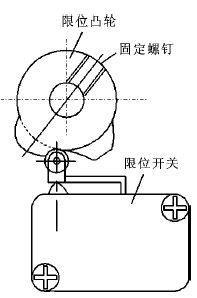
�D4 �����
����ͬ�ӣ���׃ݔ����̖���_�J�y�U���ӕr���^�m�����pСݔ����̖��ʹݔ���S�ȏ��ɉ��s����ݔ���S�½��s1mm���{��݆����λ�_�P������ݔ���Sֹͣ�����\�ӡ����O��1mm���������_���~��ݔ�������ɴˌ��Fݔ���S�½�λ�õ���λ��
����2.3���������Y�C��
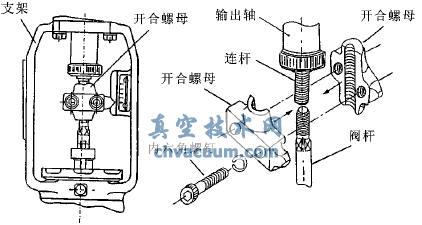
�D5 ݔ���S���y�U�B��
����ͨ�^֧�܌��������ͷ����y�ӣ������_����ĸ��������ݔ���S���y�U�ӣ��_����ĸ��ָᘣ�֧���O�˳ߣ���ָʾݔ���S���y�Uλ�ơ���D5��ʾ��
3��늄ӈ��������f����
�����ɿ���ϵ�y���{�����o����DC4��20mA�����̖Is������I/V�D�Q��늉���̖Us;�X݆�p��ݔ����ֱ��λ����̖X��λ�Ùz�y�C���γɷ�����̖Uc�ͽo���������γ�λ�÷�����̖Uf;Us��Uf�ɂ���̖���^һ���^��ͷǾ��ԭh������늙C�\�D��늙C���X݆�p�ق��әC���a������λ�ơ���I/V�D�Q�ஔ��һ�������h�����^����Ӌ�㣬���Բ����]������늄ӈ��ЙC�����S�������^늭h���͂��f�����ɲ��ֽM�ɵ��]�h����ϵ�y��ԓ�]�h����ϵ�y��늉���̖Us����I/V�D�Q����̖��ݔ�룬λ�÷���Uf��̖��ݔ�������Ђ��f������늙C���p�ٙC����λ�÷����C���M�ɡ�
����3.1�����f��������ʽ
�����ķ���늄ӈ������ĸ����M�ɲ��ֳ��l����K�����Թ�늉���ݔ�롢����늉���ݔ���ĕr��ģ��
�������_�h���f����
����3.2���_�h���f�����ą���
����ϵ���A���ַ��̣����Ľ�飺
����ʽ�У�![]() (c1��c2���������)�����A���ַ��̵Ľ�ĈD�ο��Â��f��������D��ʾ���������̵Ľ⣬���r�gt�ܴ�r��
(c1��c2���������)�����A���ַ��̵Ľ�ĈD�ο��Â��f��������D��ʾ���������̵Ľ⣬���r�gt�ܴ�r�� ![]() 헺�С�����Ժ��ԡ����ԕr�gt�^��r��uf����һ�lֱ������uf��ȡ���c��ֱ���������R��B��ֵ��
헺�С�����Ժ��ԡ����ԕr�gt�^��r��uf����һ�lֱ������uf��ȡ���c��ֱ���������R��B��ֵ��
������
������
����t=0��늄әC���ٶ�
��������
�����C���������ɵ�
�����ɴ˱��������ЙC���Ă��f������
4��늄ӈ������Ŀɿ���
����늄ӈ������Ŀɿ���ָ��Ҏ���ėl���¡�Ҏ���ĕr�g�����Ҏ�����ܵ������������ڃȿɿ���Ҏ�����о����A��ȡ�Q������ʧЧ���S�CʧЧ�c�ēpʧЧ�����ÿɿ���R�������Ҏ�����ܸ��ʣ����Hʹ�Õr��ƽ���o���ϕr�g����4.1��늄ӈ�������������
�������늄ӈ������ɿ��ԣ����M���p�ٺ��������ϡ��䌍�����@ʾ�����ԣ�����ijһԪ��ʧ�`��ϵ�yԪ��/�����C�������Լ�늚���^�̿������صȡ�
�����{ԇ�A�ι��ϡ���늄ӈ������Ĺ����^����s�����������OӋ�����졢���b�������Ƚ�����һ�𣬳��F������ƽ������λ�����_����Ҫ��ȹ��ϡ�
�����\�г������ڹ��ϡ���Ҋ��λ�_�P��ʧ�`�ȡ�һ���M���\�����ڣ�ϵ�yԪ/����̎���ϼ��\�Р�B���������^�͡�
�����\�к��ڹ��ϣ���Ԫ/���������l�ʺ�ؓ�d���F����דp���Ⱥ�ĥ�p�����F�yλ�������|��������λ���Ȳ�������½���Ч�����@���ͣ���������u�������ˑ�����ȫ��S�ޡ�
����늄ӈ�������ż�l����һ���^�y�A�y�����ڙz�顢����ij�A�ξS�o�Y�Ϻ��Ěv�����������ڹ����Дࡣ
5���Y���Z
����늄ӷ����y�ͼ��g������ԣ������늄ӈ������ɿ��ԣ���ҕʹ�È��Ϟ�����y�OӋ�yо���������m���Ԅӿ�������늄ӈ��������б���ܺ̓����\�����ԣ�������̖̎�������ؿ��ơ��г��{���ȣ�����ϵ�y�Y���ď��s�ԡ����˱��C�@Щ�����c�\��������ʹ�Õr���F�����¿ɿ��Ԇ��}����ͻ����
�����Ԅӿ���ϵ�y�У�늄ӈ������nj��F�Ԅӿ��ƵĈ�������������x�����|�����^�P����ʹ�������Ŀ���˼·���߳��Ŀ��Ʋ���Ҳ�y���_���A�ڵĿ���Ч������ɿ����ܸ��N���sδ֪���ص�Ӱ��c�Ƽs�����F��ʽ���N���ӡ����늄ӈ������Ĺ����\�ࡢ�A����ʩ���m�e���g�������ơ��_�����϶�λ���ʴ_���S�����ס������{��������֮Ŀ�ġ�