����DCS���F�L�y늄ӈ��������_�P������
���������������a���˻�G�ضȿ�������s�L�y�Ě�ӻ�늄ӈ������팍�F��ԓ�������ܷ��\��ֱ���Pϵ���˻�G�����I�ƶȣ��DZ��C�����˻��|�����P�I���ء��ҹ�˾һ�l�������a�����˻�G���õ��Ƿ���Bergard��˾��늄ӈ�����������F���h���ض��^�ߣ���Ɉ��������ŷ�ϵ�yԪ�����ϻ����ŷ��Ŵ����������F����������ʎ�ȹ��ϣ����ؕr���Ĉ�������늄әC���m����ξS�ޣ����Q�µ��ŷ�ģ�K�����������������y���ڸߜحh���·����\�У�ʹ�O����\�оS�o�ɱ�������ӣ�߀�o���a�����^��Ӱ푣���ˣ��Q����15�_�������M�м��g���졣
1��ԭϵ�y����ԭ��
�����˻�G�L�y�������ܿ���DCSϵ�y���ҹ�˾DCS���õ���SIEMENS��˾��S7-400H����ϵ�y�����L�y�_��ֵ���п��Ҳ����ˆT����λ�C�o����4��20mA�����̖��DCS��ģ�M��ݔ��ģ�KSM332ݔ���������L�y��늄ӈ��������������Ȳ����ŷ��Ŵ���������̖�cλ�÷�����̖�M�б��^���õ�ƫ����̖������̖���^�Ŵ����ŷ�늙C�������D���ٽ��������p�����p�٣�����ݔ���S��׃�D�ǣ�ݔ���S�D�ǵ�׃����ʹ�µ�λ����̖�����o�ŷ��Ŵ������^��ֱ��ƫ����̖С�����^λ�ã��˕rݔ���S�ͷ������cݔ����̖���������D��λ���ϣ�ԭ����D1��ʾ��
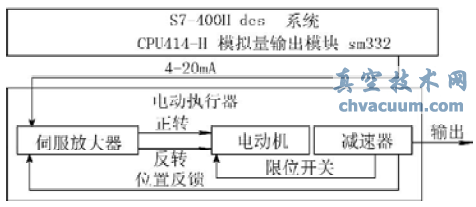
�D1ԭϵ�yԭ��D
�������������������F���ϵIJ�λ�����w�F��늄ӈ������Ȳ����ŷ��Ŵ������֣��ŷ��Ŵ����mȻ���յ���ģ�M��̖������K���ƈ������ŷ�늙C�Ĵ_���_�P����̖(������̖)���҂��ܷ�ȥ�������ڸߜحh���·����������ŷ��Ŵ�����������DCSϵ�yֱ�ӿ����ŷ�늙C�Ą����Ķ����F�ŷ��Ŵ����Ĺ�����?���ǿ϶��ġ�
2�������ʩ
2.1��Ӳ������
������ԭ����S7-400Hϵ�y�в��ģ�M��ݔ��ģ�KSM332�����Ӷ��K8·ģ�M��ݔ��ģ�KSM331������һ�K16·������ݔ��ģ�KSM322�����ڰ�ȫ���]���҂����Ô�����ݔ��ģ�Kֱ����늙C���������O�Wķ��24V�^������ڿ���늙C�����D��������ԭ��λ�_�P���F늙C�����әC����Ӳ�����o��ģ�M��ݔ��ģ�K��ݔ����̖�N��ð��b��ģ�K��������̿�(��Q����ģ�K)���O�ã�ģ�Kÿ�ɂ�ͨ����һ�M������һ�����̿������������̿����O����Bλ�ã������̿��ϵĘ�ӛB��߅�������μ��^������ģ�K�ϵĘ�ӛ��Bλ�ð���4�N늉�ݔ�룬���̞�+/-10V��λ�÷�����̖����ģ�K֮ǰ��Ҫ�_�����̿������_λ�ã���t���p��ģ�M��ݔ��ģ�K��0��10V��λ�÷�����̖ͨ�^������|����ģ�M��ݔ��ģ�KSM331�����Ό��ڹ��Ҫ�ɿ��ӵء�������ϵ�yԭ����D2��ʾ��
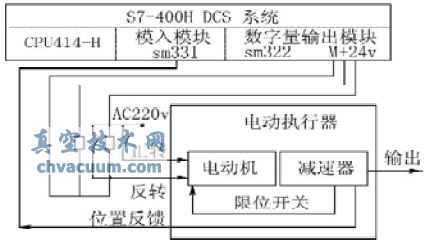
�D2 ������ϵ�yԭ��D
2.2��ܛ���M�B
����ܛ���������Ҫ��������ͨ�^���T�ӹ�˾��PLC����ܛ��Step7���µ�Ӳ��ϵ�y�M�нM�B�ͅ����O�ã��Դ_��ģ�K����������
����(1)�M��ݔ��ģ�KSM331Ҫ�څ����O�����O�����S�\���Д��ģ�Mֵ���^����ֵ��Ӳ���Д࣬������ͨ���a�������Д������ֵ������ֵ�O��10V��0.1V��
����(2)SM331��ͨ���Ĝy���N��x���“E”��ʾ�y���N�늉��������x헾��x+/-10V��Ҫ�_�����̿���λ���cstep7�е��O�ñ���һ�£���tģ�K��������������
����(3)�����҂�Ҫ����plc����팍�Fԭ�ŷ��Ŵ����Ĺ��ܣ�0��10V��“λ�÷�����̖”��ģ�M��ݔ��ģ�KSM332����dcs����SM332�Ȳ���AD�D�Q���D�Q��Ĕ�����������0��27648��dcs����ֵ�������е��^��׃��“position”�c�O�����������yֵ���^���糬�ބt늙Cͣ�D���i���yλ���˕r늙C�D�ӵĿ�����ֻ̖�ܷ���ݔ�����Ķ����F늙C�����әC����ܛ�����o���������yֵ�������H��r�x��60��27586���������H�yλ��0.2��89.8°;��δ���^������ֵ��dcs������̖�c�o��ֵ(�����е�“DB4.MAN1”)���^�����늙C�D�ӣ��e��Ҫָ�����ǣ����ڷ�����̖���ɱ���ػ�������̖�����Ԟ��˱���늙C�l���������ڿ��Ƴ����б�횼��벻�`��^����“���^”���������Oֵ�������D�������ֳ������£�
����⋯
����Network3��
����AN #protect_R //���D���o���
����JNB_0c2 //�籣�o�������D�Y�����γ���
����L "DB4"��MAN1 //�yλ�˹��o��ֵ
����L #position //λ�÷���ֵ
����-R //���
����T#difference //�õ�λ�÷����c�˹��o���IJ�ֵ
����⋯
����L #difference
����L #d_zone //���^ֵ
����>R //���^������ֵ�������^ֵ
����=
����⋯ #FWD //ݔ�����D��̖
����������������Կ�������λ����̖#positionС�ڽo��ֵ"DB4".MAN1����ƫ��#difference�������^�O��ֵ#d_zone�r������������(#FWD=1)���S�����������\�ӣ�λ�÷�����̖��������(�p��)��ƫ��ֵС�����^���O��ֵ�r���o��������늣����È������đT�Ա���ƫ���Mһ���sС��������^ֵ�O���^�t��ʹ������ݔ�����ܺܺõظ�ۙݔ����̖�����Ϳ��ƾ��ȡ������^ֵ�O���^С��늄әC��늕r�����ڑT�Զ��ߣ���������ʹƫ��ֵ����Խ�^���^���Ķ�����늄әC�����D�ӣ���˷��̈́��������F����ʎ���ϣ���ϵ�yΣ���^���҂����H�{ԇ�r��늙Cͣ�D����T��ǰ�_��������̖߀�мs0.02V���ҵ�׃��������҂�����̖���^ֵ����0.05V�������Ќ����Ĕ�������27648/10×0.05=138.24�����H�����yλ׃���s��0.45°���L�y�D����0.45°�IJ��`��^���L�����ƻ����]��Ӱ푣���ˌ������е����^��ֵ��138����d_zone=138�����⣬�M���pС���������әC���ęCе����g϶��Ҳ�DZ�����ʎ����߿��ƾ��ȵ���Ч�ֶΡ�
3���Y���Z
��������dcsϵ�y�`�����ľ��̹��ܣ�ͨ�^ܛ�����F늄ӈ��������_�P�����ƣ�ȥ���˳ɱ������������ʸߵ��ŷ�����������˿���ϵ�y�Ŀɿ��ԣ��pС�˾S�����������˾S�ɱ�����09��ԓ�Ŀ�����{ԇ�ɹ����˻��L�y����ϵ�y�\�з�����������˻��|���춨�˻��A��