�����N���㷨��늄ӈ�(zh��)�����������
����ᘌ���늙C(j��)�T����ɵ�늄ӈ�(zh��)�������ܾ��_��λ�Ć��}����B��һ�N�µ�늄ӈ�(zh��)���������㷨--�N���㷨����������ԓ�㷨��늄ӈ�(zh��)�����M(j��n)���˷����������ͬ�ڂ��y(t��ng)��늄ӈ�(zh��)�����������N���㷨��늄ӈ�(zh��)��������Ҫ�κ��Ƅ��b�þ�����Ч������늙C(j��)�đT�Ԝ�(zh��n)�_��λ��Ԕ��(x��)�������N���㷨������Matlab���̌�(sh��)�F(xi��n)��ԓ�㷨�����늄ӈ�(zh��)�����M(j��n)�з���ԇ�(y��n)������Y(ji��)���(y��n)�C���N���㷨�Ŀ����ԡ���Ч�Լ������ԡ�
1������
����늄ӈ�(zh��)�������鹤�I(y��)�Ԅӿ���ϵ�y(t��ng)�еĈ�(zh��)��Ԫ����Ҫ��ϵ�y(t��ng)�l(f��)����ָ���������١���(zh��n)�_�ķ���(y��ng)���Դ_��ϵ�y(t��ng)�������\(y��n)�С�ᘌ�늄ӈ�(zh��)������Ŀǰ��Ҫ�����о����ǿ����㷨��늙C(j��)���(q��)�ӷ�ʽ���Ƅӷ�ʽ���S���F(xi��n)�������V����(y��ng)���ڹ��I(y��)�����У����ڬF(xi��n)�����������܈�(zh��)����Ҳ��Ŀǰ�о���һ������
�������˽�Q����늙C(j��)�đT�Զ�����늄ӈ�(zh��)�������ߵĆ��}��Ŀǰ���õķ����Dz��ÙC(j��)е�Ƅӻ�늚��ƄӁ��˷�늙C(j��)�đT�ԡ��mȻ���l�b�û�늴��O(sh��)����ʹ늙C(j��)����ͣ�D(zhu��n)������늄ӈ�(zh��)�����ĽY(ji��)��(g��u)Ҳ���׃�î�����(f��)�s��ͬ�r�侫�_��Ҳ�S���Ƅ��b�õęC(j��)еĥ�p���ܵ�Ӱ푡����N���㷨���ǻ�������늙C(j��)�T��ʹ늄ӈ�(zh��)������(zh��n)�_��λ�Ļ���˼�롣ͨ�^�������N���㷨��늄ӈ�(zh��)�����M(j��n)�з���ԇ�(y��n)�������ó��N���㷨�Ŀ���Ч��ȡ�Q��늙C(j��)���D(zhu��n)�ӑT�����N���㷨�ą���(sh��)����һ���ėl���£������N���㷨��늄ӈ�(zh��)�����܉���ٜ�(zh��n)�_�ض�λ��
2��늄ӈ�(zh��)�����ĽY(ji��)��(g��u)
����늄ӈ�(zh��)������Ҫ�ɿ��Ɔ�Ԫ��늙C(j��)�͈�(zh��)�ЙC(j��)��(g��u)�M�ɣ������ԭ����D1��ʾ�����Ɔ�Ԫ����(j��)�o����̖�c�{(di��o)��(ji��)�C(j��)��(g��u)λ�Ʒ�������ƫ��a(ch��n)���������(q��)��늙C(j��)�\(y��n)�У���(j��ng)�^׃�ټ������b��ݔ����λ�ƻ�ֱ�г�λ�ƣ���(sh��)�F(xi��n)���y�T��������{(di��o)��(ji��)�C(j��)��(g��u)��λ�ÿ��ơ�
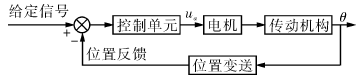
�D1 늄ӈ�(zh��)����ԭ����D
����늄ӈ�(zh��)�����ęC(j��)��ģ�Ϳɺ����飺
����ʽ�У�θ--늄ӈ�(zh��)�����Ľ�λ��ݔ��;ua--���Ɔ�Ԫ��ݔ����

����ʽ�У�J--늙C(j��)����Ч�D(zhu��n)�ӑT��;f--늙C(j��)����Чճ��Ħ��ϵ��(sh��);CM--����ϵ��(sh��);Z1--늙C(j��)�����X݆�X��(sh��);Z2--늙C(j��)�Ą��X݆�X��(sh��);M3--늙C(j��)�Ą��X݆��ؓ(f��)�d���ء�
3���N���㷨
���������N���㷨��늄ӈ�(zh��)��������Ҫ�Ƅ��b�ÿ˷�늙C(j��)�đT�ԡ�λ�÷�����̖�c�o����̖��ƫ���ek=sp–y����(d��ng)ek�_(d��)�������O(sh��)�����ֵ�r��늄ӈ�(zh��)������늙C(j��)��늣�늙C(j��)�D(zhu��n)���ڑT�Ե������£������{(di��o)��(ji��)�C(j��)��(g��u)�_(d��)���O(sh��)��ֵ��
3.1���N���㷨�Ļ���˼��
�������Ȟ�늄ӈ�(zh��)������λ�÷���ֵ�c�o��ֵ֮�g��ƫ��ek�O(sh��)���ɂ����^(q��)�ֵ�������^(q��)�ֵα�̓�(n��i)���^(q��)�ֵβ����D2��ʾ��
������(d��ng)ƫ��^��ֵ����α�r���o늙C(j��)ͨ�������늉�;��(d��ng)ƫ��Ľ^��ֵ����α��β֮�g�r���Д�늙C(j��)�Դ��늙C(j��)�D(zhu��n)���ڑT���������D(zhu��n)�ӡ���(n��i)���^(q��)�ֵβ�c�������P(gu��n)����(d��ng)ƫ��^��ֵС��β�r�����J(r��n)��늄ӈ�(zh��)�����ѽ�(j��ng)�_(d��)���˾���Ҫ�����㷨��ݔ����uk��ȡֵ��0��1��-1���քe��ʾ늙C(j��)��늡�ʩ������늉���ʩ�ӷ���늉���
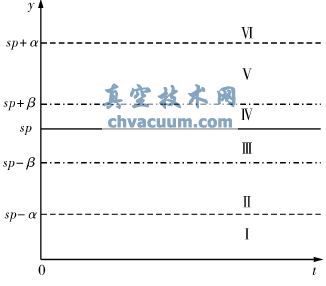
�D2 �����^(q��)�ֵα�̓�(n��i)���^(q��)�ֵβ
3.2���N���㷨�ľ��w����
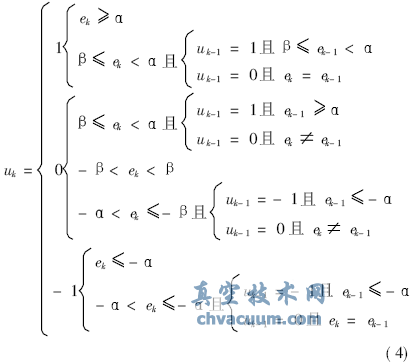
����(1)��(d��ng)ek≥α�r����(zh��)����ݔ��y�M(j��n)��?y��n)^(q��)��I�����{(di��o)��(ji��)�C(j��)��(g��u)��λ��߀�]�_(d��)���O(sh��)���������^(q��)�ֵ���t늙C(j��)��(y��ng)ԓ���D(zhu��n)����Ҫ�o늙C(j��)ʩ������늉������N���㷨��ݔ��uk=1��
����(2)��(d��ng)β≤ek<α�r����(zh��)����ݔ��y�M(j��n)��?y��n)^(q��)��II������(n��i)�������^(q��)֮�g�����˷փɷN��rӑՓ��
�����ٹ���һ�ɘ����ڵĿ����㷨ݔ��uk-1=1��ƫ��ek-1≥α����(zh��)����ݔ��y��ǰһ���IJɘ����ڄ��ą^(q��)��I�M(j��n)��?y��n)^(q��)��II���˕r��(y��ng)�Д�늙C(j��)���Դ����uk=0��ʹ�D(zhu��n)���ڑT�Ե��������^�m(x��)�D(zhu��n)�ӡ��������uk-1=1��β≤ek-1<α���f����(zh��)����ݔ��y����һ�ɘ�����֮ǰ���ѽ�(j��ng)�M(j��n)���˅^(q��)��II�����ڑT����������Ȼ�]�е��_(d��)��(n��i)���^(q��)�������Ҫ�^�m(x��)�o늙C(j��)ʩ������늉���uk=1��
��������һ�N��r�ǣ������һ�ɘ����ڵ�ݔ��uk-1=0���f������һ���ɘ������У��D(zhu��n)���ѽ�(j��ng)�ڑT���������D(zhu��n)���ˡ����@�N��r�¾͑�(y��ng)�Д�늙C(j��)�D(zhu��n)���Ƿ��ѽ�(j��ng)ֹͣ����ek≠ek-1���f��늙C(j��)�D(zhu��n)��߀�]ֹͣ�D(zhu��n)�ӣ������㷨��ݔ��uk=0��늙C(j��)�^�m(x��)�ڑT���������D(zhu��n)�ӡ����ek=ek-1���f��늙C(j��)�D(zhu��n)���ѽ�(j��ng)ֹͣ����ô�^�m(x��)�o늙C(j��)ʩ������늉�����uk=1;
����(3)��(d��ng)0≤ek<β�r����(zh��)����ݔ��y�څ^(q��)��III���_(d��)������Ҫ��(y��ng)�Д�늙C(j��)�Դ����uk=0��
����(4)��(d��ng)ek<-α�r����(zh��)����ݔ��y�څ^(q��)��VI��늙C(j��)��(y��ng)ԓ���D(zhu��n)��ʹy�pС�����ԑ�(y��ng)�o늙C(j��)ʩ�ӷ���늉�����uk=-1��
����(5)��(d��ng)-α≤ek<-β�r���@�cβ≤ek<α����r��ƣ����]�ɷN��r��
�����ٮ�(d��ng)uk-1=-1��ƫ���ek-1≤-α�r����(zh��)����ݔ��y���ą^(q��)���M(j��n)��?y��n)^(q��)����(y��ng)ʹ늙C(j��)��늣���uk=0��ʹ�D(zhu��n)�����ÑT���D(zhu��n)�ӡ����uk-1=-1��-α≤ek-1<-β���f����(zh��)����ݔ��y�ڑT��������߀�]���_(d��)��(n��i)���^(q��)��(n��i)���˕r늙C(j��)��(y��ng)ԓ���D(zhu��n)����uk=-1��
�����ڮ�(d��ng)uk-1=0�r���f������һ���ɘ�������늙C(j��)�ѽ�(j��ng)��늣����@�N��r�¾͑�(y��ng)�Д�늙C(j��)�D(zhu��n)���ڑT�������µ��D(zhu��n)���Ƿ��ѽ�(j��ng)ֹͣ����ek≠ek-1���f��늙C(j��)�D(zhu��n)��߀�]ֹͣ����(y��ng)ʹ늙C(j��)�^�m(x��)�ڑT���������D(zhu��n)�ӣ������㷨��ݔ��uk=0�����ek=ek-1���f��늙C(j��)�D(zhu��n)���ѽ�(j��ng)ֹͣ������(zh��)����ݔ��y߀�]���_(d��)��(n��i)���^(q��)����ô��Ҫ�ٽo늙C(j��)�ӷ���늉�����uk=-1��
����(6)��(d��ng)-β≤ek≤0����(zh��)����ݔ��y�څ^(q��)����(zh��)����ݔ��y���_(d��)������Ҫ��ʹ늙C(j��)��늣�uk=0��
3.3���N���㷨�Ĕ�(sh��)�W(xu��)����
�������������N���㷨������������ʾ����ʽ(4)��ʾ�Ĕ�(sh��)�W(xu��)���_(d��)ʽ��
4�����挍(sh��)��
��������(j��)���_(d��)ʽ(4)������Matlab���̌�(sh��)�F(xi��n)�N���㷨�����քe�چ�λ�A�S������ݔ����늄ӈ�(zh��)�����M(j��n)�з��档
4.1��늄ӈ�(zh��)�����Ć�λ�A�S푑�(y��ng)
��������(j��)ʽ(2)��ʽ(3)��֪��k��τ��ֵ�c늙C(j��)���D(zhu��n)�ӑT��J�ɷ��ȡ�����xȡ�ɽMk��τ��ֵ���چ�λ�A�Sݔ����늄ӈ�(zh��)�����M(j��n)�з��档�ɽMk��τ��ֵ�քe�飺k=0.012��τ=0.5;k=0.0012��τ=0.05���N���㷨�еą���(sh��)�������^(q��)�ֵ�̓�(n��i)���^(q��)�ֵ�O(sh��)��α=0.005��β=0.003��늄ӈ�(zh��)������λ�A�S푑�(y��ng)������D3��ʾ��
�����D3�f����(d��ng)늙C(j��)�T����С���m�r�������N���㷨��늄ӈ�(zh��)�����ܿ��١���(zh��n)�_�ض�λ�����Ǯ�(d��ng)늙C(j��)���D(zhu��n)�ӑT������r��늄ӈ�(zh��)������λ�A�S푑�(y��ng)�ij��{(di��o)�����ӣ��{(di��o)��(ji��)�r�g׃�L����늙C(j��)�D(zhu��n)�ӑT��̫��늄ӈ�(zh��)�������l(f��)����ʎ���@����?y��n)�늙C(j��)�T��̫��ʹ늙C(j��)�D(zhu��n)���ڑT�Ե��������D(zhu��n)��̫��(d��ng)��(n��i)�������^(q��)�ֵ֮���С�r��ƫ��Ľ^��ֵ�Oek�O���Ǵ��������^(q��)�ֵA(ch��)����ʹ늄ӈ�(zh��)����������늙C(j��)�T�Ե��������_(d��)���O(sh��)��ֵ��

�D3 ��ͬ�D(zhu��n)�ӑT����늄ӈ�(zh��)������λ�A�S푑�(y��ng)
�����b���D(zhu��n)�ӑT��̫��Ć��}��ͨ�^��׃�����^(q��)�ֵα����늙C(j��)����(sh��)��k=0.0012��τ=0.05��늄ӈ�(zh��)�����M(j��n)�з��棬�õ������^(q��)�ֵα=0.005��α=0.03�r늄ӈ�(zh��)�����Ć�λ�A�S푑�(y��ng)������D4��ʾ��
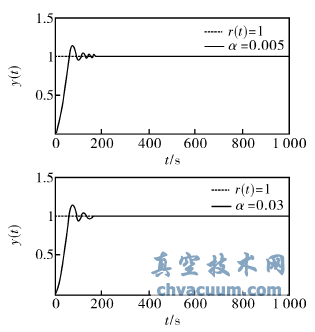
�D4 �xȡ��ͬ�����^(q��)�ֵ��늄ӈ�(zh��)������λ�A�S푑�(y��ng)
�����ɈD4��֪����(d��ng)�����^(q��)α��0.005���ӵ�0.03��늄ӈ�(zh��)�����{(di��o)��(ji��)�r�g׃�̣��Ք��ٶȼӿ죬���dz��{(di��o)���]�МpС��
4.2��늄ӈ�(zh��)����������푑�(y��ng)
���������(y��n)�C�����N���㷨��늄ӈ�(zh��)�������r׃ݔ���푑�(y��ng)��������ݔ����늄ӈ�(zh��)�����M(j��n)�з��档
�����xȡ���M늙C(j��)����(sh��)��k=0.012��τ=0.5;k=0.0012��τ=0.05;k=0.00012��τ=0.005���N���㷨�еą���(sh��)�������^(q��)�ֵ�̓�(n��i)���^(q��)�ֵ�O(sh��)��α=0.005��β=0.003��늄ӈ�(zh��)����������푑�(y��ng)������D5��ʾ��
�����ɈD5��֪����늙C(j��)�D(zhu��n)�ӑT���^С�r�������N���㷨��늄ӈ�(zh��)������Ѹ�ٜ�(zh��n)�_�ض�λ����ۙ�r׃ݔ����̖������(d��ng)늙C(j��)���D(zhu��n)�ӑT���^��r��늄ӈ�(zh��)�����ڑT�Ե�������ƫ�x�O(sh��)��ֵ��ʹƫ���^���^�����^(q��)�ֵ���Ķ�늄ӈ�(zh��)������������늙C(j��)�đT�Ԝ�(zh��n)�_�ض�λ��
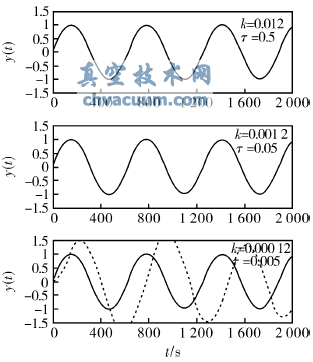
�D5 ��ͬ�D(zhu��n)�ӑT����늄ӈ�(zh��)��������푑�(y��ng)
������׃�����^(q��)�ֵα��늄ӈ�(zh��)�����M(j��n)�з��棬�õ������^(q��)�ֵ�քeα=0.005��α=0.03�r늄ӈ�(zh��)����������푑�(y��ng)������D6��ʾ��
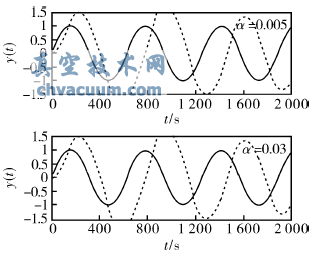
�D6 ��׃�����^(q��)�O(sh��)��ֵ�r늄ӈ�(zh��)����������푑�(y��ng)
�����ɈD6��֪����׃�����^(q��)�ֵ������Y(ji��)����Ӱ푲����@���f���N���㷨���ڕr׃��ݔ����̖�ĸ�ۙ������Ҫȡ�Q��늙C(j��)���D(zhu��n)�ӑT����
5���Y(ji��)Փ
����ᘌ�늄ӈ�(zh��)�����Ƅ��b�Ì�늄ӈ�(zh��)�����Y(ji��)��(g��u)�����ܵ�Ӱ푣����˺���늄ӈ�(zh��)�����ĽY(ji��)��(g��u)��ͬ�r����䶨λ�Ĝ�(zh��n)�_�ԣ��о����N���㷨��늄ӈ�(zh��)�����еđ�(y��ng)�á�����ԓ�㷨��늄ӈ�(zh��)��������Ҫ�Ƅ��b�á�ͨ�^��ƫ���O(sh��)�Ã�(n��i)���^(q��)�ֵ�������^(q��)�ֵ��ʹ늄ӈ�(zh��)������늙C(j��)�T�Ե��{(di��o)������(zh��n)�_��λ��ͨ�^����ԇ�(y��n)�ó��Y(ji��)Փ������x����m��늙C(j��)�D(zhu��n)�ӑT���������^(q��)�ֵ�������N���㷨��늄ӈ�(zh��)�����܌�(sh��)�F(xi��n)��(zh��n)�_���ٵض�λ�����ǣ����ڕr׃��ݔ����̖����늙C(j��)�D(zhu��n)�ӑT��̫�����r�£���ʹ�{(di��o)�������^(q��)�ֵ�Ĵ�С����Ȼ�o��ʹ늄ӈ�(zh��)������(zh��n)�_��λ����ˣ���θ��ƻ����N���㷨��늄ӈ�(zh��)�������r׃ݔ��ĸ�ۙ���܌�����һ�����о�����