צ���D�Ӹ�ʽ�Cе��ձù���ԭ��
����צ���D�Ӹ�ʽ�Cе��ձ� ( ���º��Qצʽ�� ) �ڱÚ��Ⱦ��Ѓɂ���ܗ���ϵ�צ���D�ӡ��c�_����ձ���ƣ��D����һ��ͬ���߾����X݆�펧�����D���̶���λ���D���;������Δ[���͈A���M�ɣ��D��֮�g���D���c�Ú�֮�g�������|������С���g϶�����w���M��ں��Ś�ھ��O�ڱÚ��Ķ����ϣ��քe�Ƀɂ��D�Ӷ��������ԵĶ��r�_�]�������y���{�����á�
�D26��צʽ�õĹ���ԭ��D
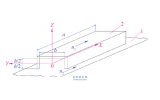
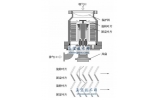
������צʽ�õĹ���ԭ���������������Dʽ�ݷe��ձá��D 26 ��ʾצʽ�õij����^�̡��ɈD��Ҋ����ǻ��צ���D�ӷָ�������ǻ���Ś�ǻ�ɲ��֡�
�����D 26(a) �DZ���������Ś���^�̣�������ǻ�S���D�ӵ����D���ݷe��u����������w;���Ś�ǻ�ݷe�t��u�pС�������w�M�Љ��s���Ķ��ų����w��
�����D 26(b) �DZ��D�ӄ���λ��������Ś�Kֹλ�ã�����ں��Ś�ڱ��D�ӵĂȱڷ�ס���˕r����ǻ���ݷe���� Vs ���ڃɂ��D��֮�g߀����˲���δ���ų���̎���Ś≺����B�Ě��w�����ݷe�� Vc ���@���֚��w���^�ɴ���Û�����ص�����ǻ�С�
�����D 26(c) ���D������̎�ړQ���˲�g���D�ӏ�ԓλ�����D�^һС�Ƕȣ��t�D���g���IJ��֚��w����Û���h�ο��gȥ���@�����D�ӷ��y���Ě��w�ĵ�һ����Û�^�̡�ͨ�^�@����Û���D���g�����w�ĉ������ͣ����h�ο��g�ȵĉ����t���ڷ��y�����w���M������ߣ��Ķ����ӱõĉ��s�Ⱥ�ʡ�õĉ��s���ʡ�
�����D 26(d) ���D�ӌ�Ҫ�M����һ������r��λ�á��@�r�D���g���]������ȥ��ʣ�����w�����������ͨ���@���֚��w���^��һ����Û�����ѽ������ˡ��S���D�ӵ��^�m�D�ӣ�����ǻ�ݷe�������@���֚��w���M�еڶ�����Û���D�ӏĈD (d) λ���^�m�D�ӣ�����ǻ�ݷe��u�����M�����⡣�Ś�ǻ�ݷe��u�pС�������Ś����δ���_����˚��w�����s�����s���S�Ś������λ�õ�׃����׃�����@�N���s�^�����_����ձ������߂�ģ�����צʽ�õĉ��s��Ҫ�h�����_����ձá����Ś���c�Ś�ǻ�еĉ��s���w��ͨ�r�������s���w���ŵ����gͨ���Ķ��M�뵽��һ������_�_�Ś��y���ŵ������ȥ���S�����D�ӵ��B�m���D������������Ś��^��ѭ�h�M�У����F�˱õ��B�m���Ŀ�ġ����D��ÿ�Dһ�ܣ�������Ś���M��һ�Ρ�
����ͨ�^���Ϸ�����֪��צʽ��ձ�ͬ�r�����_����ձú���Ƭ��ձõă��c��
�c�o��ʽ�Cе��ձ����P���������}��