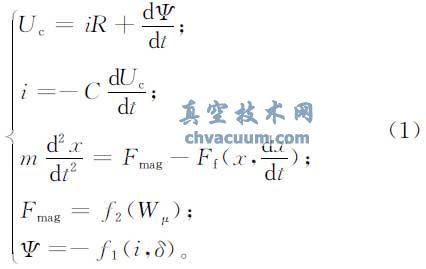
���ھ�Ȧ�����������Ք�·�����Ʒ���
������ʹ������Ք�·��(VCB)�ֺ��l�Ą����r�g����һ�£����F(xi��n)�ɿ���ͬ���P(gu��n)�ϣ��������řC��(g��u)(PMA)�ĄӑB(t��i)���ԣ������˄��|�^�ڲ�ͬ�\���A���µľ�Ȧ������Լ�������������ī@ȡ����������Simulink����ģ�ͣ�ͨ�^���M���h(hu��n)���Ʒ�����Ч���F(xi��n)�ˌ�������������ĸ�ۙ����z�����㷨���O(sh��)Ӌ����ARM ̎��������ĵ����ܿ�������ͨ�^�xȡ3�N��ͬ�����ă�����ݣ���150��200V늉�������(n��i)�M���˔�·���ķֺ��l���Y(ji��)��������������������ԭ���O(sh��)Ӌ�Ŀ�����������Ч���Ɣ�·���Ą��|�^���г�܉�E��ʹ���|�^���\��܉�E�c��������������\��܉�E����һ�£����x���ľ�Ȧ������������£����H��·���ֺ��l�Ą����r�g���`��≤0.3ms��
��������
������(d��ng)��·���_����]������O(sh��)��r��늉���������S�C�ģ�����P(gu��n)��˲�gϵ�y(t��ng)���a(ch��n)��ӿ�����^늉���������O(sh��)����ɓp����ͬ���P(gu��n)�ϼ��g(sh��)���ԜpС�����^���е�ӿ�����^늉����s��ϵ�y(t��ng)���B(t��i)�^�̡�������ϵ�y(t��ng)�ķ�(w��n)���ԡ��pС����·�������ēp���������֔��������似�g(sh��)�P(gu��n)�I������ߙC��(g��u)�����Ĝʴ_�ԡ����y(t��ng)��·���IJلәC��(g��u)�Ą�����ɢ�Դ��\�ӿɿ��Բ푑�(y��ng)�ٶ���������������ͬ���P(gu��n)���I(l��ng)��İl(f��)չ�����řC��(g��u)���㲿���٣��Y(ji��)��(g��u)���Σ�ͨ��ֻ��һ���\�Ӳ������������ɢ��С���Cе�����L�����_�P(gu��n)ͬ���P(gu��n)�ϼ��g(sh��)�Č��F(xi��n)�ṩ�˺ܺõı��C�����ڲلәC��(g��u)�Ŀɿ���ֱ��Ӱ�������Ք�·�����\�пɿ��ԣ���ˣ����řC��(g��u)�ӑB(t��i)���Ե��о��ܵ��ˏV�����P(gu��n)ע���īI�����řC��(g��u)�ӑB(t��i)�����M��������(y��ng)����Փ���������������������Ƶķ����ṩ����Փ���A(ch��)��
�����mȻ���řC��(g��u)�Ą�����ɢ���^С�����������䃦����ݵ��������ܜض�Ӱ푣���늉�����(w��n)������Ȧ����ʕ��l(f��)��׃������˕���ɔ�·���Ą����r�g�l(f��)����׃���������řC��(g��u)�ӑB(t��i)�����^���(f��)�s���������ܽ���һ�����_�Ĕ�(sh��)�W(xu��)ģ�́��ھ�Ӌ������ԭ����ɵĄ����r�g�`���M���a�����M�����F(xi��n)���r���ơ���ˣ�ʹ�û����˹���(j��ng)Ԫ�W(w��ng)�j(lu��)�ķ������A(y��)�y�����r�g�ɞ錍�F(xi��n)ͬ���P(gu��n)�ϵ�һ�N���з���������ԓ�㷨�����_�h(hu��n)��B(t��i)����ɿ��Ƶģ���˔�·���|�^�Ą����^�̟o�����ƣ�ʹͬ���P(gu��n)�ϼ��g(sh��)���ڲ��_�����ء����⣬�����˹���(j��ng)Ԫ�W(w��ng)�j(lu��)��Ҫ�����Č�(sh��)��(j��)�M�оW(w��ng)�j(lu��)Ӗ(x��n)���������ˌ�ʩ���y�ȡ�����·�����|�^λ���������]�h(hu��n)���Ʒ����mȻ���Ԍ���·�����|�^���г��M�Мʴ_���ƣ�����λ�Ƃ������ڹ����^���еă�(n��i)���y�����^̎���\�Ӡ�B(t��i)���y���Δ�(sh��)���ޣ��������װl(f��)�����ϣ���λ�Ƃ�����ͨ����Ҫ�c���|�^�B�Uֱ���B�ӣ����װ��b��Ҳ�����T�l(f��)늚���ϣ�����������䑪(y��ng)�á�
�������������һ�N�����řC��(g��u)��Ȧ�������ƌ���ͨ�^���M�͵Ĝ��h(hu��n)�����㷨��������Ȧ����M�и�ۙ���Ƶķ�������ռ��g(sh��)�W(w��ng)(http://smsksx.com/)�J������@�N���Ʒ��������řC��(g��u)����o�������κβ��������Ɍ��F(xi��n)����·���|�^��B(t��i)�Ŀ��ƣ�ʹ��·���Ą����r�g������һ��ֵ�����·��ͬ���P(gu��n)�ϵČ��F(xi��n)�ṩ�˿ɿ����A(ch��)��ͨ�^�O(sh��)Ӌ��ARM̎��������ĵ�Ӳ��ϵ�y(t��ng)�����F(xi��n)�ˌ�12kV�η�(w��n)�B(t��i)������Ք�·���ֺ��l�Ĝʴ_���ƣ�ʹ�ֺ��l�����r�g�`����≤0.3ms���M��ͬ���P(gu��n)�ϕrҪ��ĺ��l�r�g�`��≤1ms�����l�`��≤2ms�ļ��g(sh��)Ҫ��ͬ�rҲʹ�����řC��(g��u)�Ą�ž�Ȧ�͔�·���Ą��|�^�õ����o��
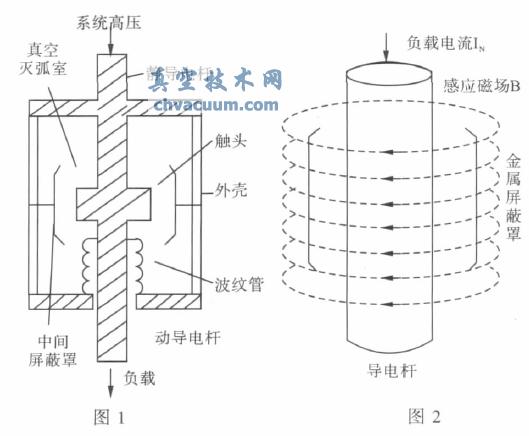
����1�����řC��(g��u)�ľ�Ȧ�������
�������řC��(g��u)�ĄӑB(t��i)��������늴ź͙Cе�ľC���^���^�̛Q���ġ������܉���Ч�绡����(y��ng)�m��(d��ng)�ӿ���|�^���ٶȣ�Ȼ������|�^�ٶ��^�t��������ײ���������ӣ�������늚�͙Cе��������ߡ���ˣ��ʴ_Ӌ�㲢�������řC��(g��u)�ĄӑB(t��i)���ԡ�ʹ��·�������^����늴����c�\�ӷ���������ό��C��(g��u)�c�_�P(gu��n)���w�z���Ե���Ͼ�����Ҫ���x�����řC��(g��u)�ĄӑB(t��i)���Կ�����ʽ(1)������
����ʽ�У�Uc�����늉���i��Ψ �քe�龀Ȧ�����늴�ϵ�y(t��ng)ȫ��朣�δ��ň��g϶��t��r�g��Wμ��늴�ϵ�y(t��ng)�Ĵ��ܣ���i��Ψ �ĺ���(sh��)��x ����Fλ�ƣ�m ��ϵ�y(t��ng)�\�Ӳ����w�㵽��F̎���|(zh��)����Fmag��Ff�քe����F�ܵ���늴��������\�ӷ�����C��R �քe����������;�Ȧ��ֵ��裻f1��f2�քe����l�^����늴������ʹ�ͨ��׃����
����6���Y(ji��)Փ
����1)���������@ȡ������������ī@ȡ������������Ч���Ƅ��|�^���\�Ӡ�pС���|�^����ײ������ʹ��ͬ�l���£���·�����غ��l�Δ�(sh��)�õ���ߣ������ڌ��F(xi��n)����غ��l��
����2)���������������������㷨�O(sh��)Ӌ�Ŀ����������F(xi��n)�ˌ�12kV�η�(w��n)�B(t��i)��Ք�·�������ܿ��ƣ�ʹ��Ք�·���ķ��l�ͺ��l�`�����≤0.3ms�����C�˷ֺ��l�r�g��һ���ԣ���ͬ���P(gu��n)�τ�(chu��ng)���˿ɿ��Ļ��A(ch��)�����ڟo��ڔ�·�����w�C��(g��u)�����κέh(hu��n)��(ji��)�����������@ȡ�ɿ����������ɘӫ@�ã���˿��Ʒ������ο��У������^�ߵČ��Ãrֵ��