����ʽ�{���y�yо-�y�Uϵ�y�����������о�
����ᘌ�����ʽ�{���y�yо-�y�Uϵ�y�����������ӆ��},�����˿��]�y�T��λ�����õ�ϵ�y�ӑB����ģ��,�o��������yо-�y�Uϵ�y푑����A��-У���㷨,����ANSYSܛ����ϵ�y�ڹ̶��_���c׃�_����r�����_���c���]����r�µ����푑��M���˶��Է������о�����:���ڹ̶��_��,�yо���Bλ��ƫ�����Լ����w���S���������Լ��_�ȜpС������,�yо�ӑBλ���^�ɕr�g�S�������Ӷ��s��,�����_������r�yоλ��푑�����Ҫ�������]���������_�ȜpС��r,�������]������r�yо�ӑBλ���^�ɕr�g����,�҉���Խ��,�yо�ӑBλ���^�ɕr�gԽ��,�����_������r�t�෴;�����_��������r,�yо�ӑBλ���^�ɕr�g�͉���֮�g���Pϵ�c�_�ȜpС��r�෴��
�����{���y��ˮ�����վ��������ʯ�͡�ұ����^�̿���ϵ�y��������Ҫ���ã�Ȼ���{���y��ijЩ���r�®a������������ɞ�������N�¹ʵ���Ҫԭ����Ӈ��ؕr����Ӱ�ϵ�y��ȫƽ�����\�С������{���y��ӵ���Ҫԭ�����y�w�Ȳ����w���ӵIJ������ԣ��c�����������ֱ�����P��
����������ό��µ��{���y��ӿ��Է֞�ɷN��һ�N���{���y���w�ڹܵ��ϵ����;��һ�N�DZ���Ҫ�о����{���y�����yо-�y�Uϵ�y��ӡ����������P�y���������ӵ��о��^�٣��Ҵ��ƫ������ijЩ�̶��_�ȡ���һ���r�·����y�w�������ȵ�˲�B���������c�y�w���yо���y�U�ď������֮�g�������������ã�����քe���{���y��늴��y����ֹ�y���Q���y�Լ������y�Ȳ�ͬ��͵��y�ĄӑB�����c������φ��}�M���˷����ԇ��о���
����������ij��̖����ʽ�{���y�錦���о��{���y�yо-�y�Uϵ�y�����_ʽ�c���]ʽ���̶��_���c׃�_�ȹ��r�r�����������ӆ��}��ͨ�^�������]��λ�����õ�ϵ�y����Ԫ�������ģ�Ͳ��M�з��棬�������_�ͺ����]���{���y�yо-�y�Uϵ�y�ڹ̶��_�Ⱥ�׃�_�ȗl���µĄӑB푑���
1���yо-�y�Uϵ�y�����Wģ��
����1.1������ʽ�{���y�Y��
��������ʽ�{���y���w�Y����D1��ʾ����Ҫ�Ɉ��ЙC�����{���C���M�ɡ����ЙC����������ݔ�������̖�D�Q���{���y�y�U��ֱ��λ��;�{���C��ͨ�^�y�U�c���ЙC�����B������λ����̖�D�Q���yо���y��֮�g��ͨ��e��׃�����Ķ���׃�����y�w�����w�\�Ӡ�B������ʹ�yо���y��֮�g���_�ȷ�����ij���ض�λ���Ա��C���F��������Ҫ���Ŀ�ˠ�B���{���y�O���y�T��λ���������M�����y�U���Hλ�ƞ�y����̖���Կ��������ݔ�����O����̖�ķ�������ϵ�y��
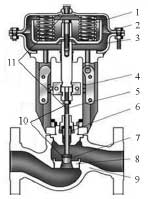
�D1 ����ʽ�{���y�Y��ʾ��D
1.����2.ĤƬ3.����4.λ�ƿ̶�5.�y�U6.����7.�yо8.�y��9.�y�w10.�{���C��11.���ЙC��1.2 �yо-�y�Uϵ�y�����Wģ��
�����yо-�y�Uϵ�y���{���y����-�{���C�������w����Ҫ������ĤĤƬ���ƗU�����ɡ����ϡ��y�U���yо���y���ȣ���D1��ʾ��
���������ض��{���y�Y�������{��������Ҫȡ�Q���yо-�y�U�����y�����\�ӡ��yо-�y�U�c���ҏ��ɡ����ϡ����w�ȽM��һ��������τ����Wϵ�y���ڽ����yо-�y�U�����Wģ��֮ǰ�����¼��O���{���y�Ȳ������w(ˮ)�Dz��ɉ��s��;���{���y�����^���У�ˮ�]�Пύ�Q;�y�U�c����֮�g��Ħ�����J����һ�Nճ��������;�����y�w�鄂���w�������䏗��׃��;�yо-�y�Uֻ���S���\�ӣ������]�M���\��;�����y�Ĉ��ЙC�����������È��ЙC����
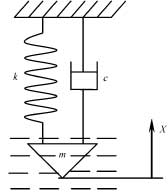
�����������ϼ��O�Լ������y�ĽY���D�����Ԍ��yо-�y�Uϵ�y������һ�������ɶ��|��-����-����ϵ�y����D2��ʾ���yоλ������ԭ�c�O���y�Tȫ�P��λ�ã�ȡ���Ϟ�������
�D2 �yо-�y�Uϵ�y�����Wģ��
���������D2��ʾ�������y�yо-�y�Uϵ�y�����W���̞�
����———�yоt�r�̵�λ�ơ��ٶȼ����ٶ�
����m———�yо-�y�Uϵ�y�Ŀ��|��
����k———���Ʉ���ϵ��
����c———��Чճ������ϵ��
����Fc(t)———���ЙC���������yо�ϵĿ�����
����Fl(t)———���w��ƽ����
����g———�������ٶ�
����ʽ(1)�����w��ƽ����Fl(t)(���º��Q���w��)��ָ�г��{���C�������w�������yо�ϵ��S����������С�c�{���y�ɶ˵ĉ���yо��С���Π�{���y��͡��y���Ή��������w�������w�������Ե��������P���������_ʽ����(�D1�����w��������룬�҂�����)�����w����
����ʽ�� p1———�yǰ���� p2———�y����
����Δp———ǰ�� ds———�yоֱ��
����dz———�y�Uֱ��
�����������]ʽ����(�D1�����w���҂����룬�������)�����w����
�������ڄӑB���}���oՓ���_ʽ߀�����]ʽ�����yо�ܵ��Č��H���w��Fl(t)���yо���·ֲ��ĉ���(ͨ�^�A��-У������Ԫ�������Ӌ��)���yо������e�e����á�����ʹ����^�̺��������Ԍ����w�������J�����w�������yо��Ч�M����e�����õĽY����
����ʽ(1)�п�����Fc(t)��ָ���ЙC���������{���C���yо-�y�Uϵ�y�ϵ��S���������С�c�-���y�T��λ���Y��������������ݔ�������̖�a����늴����Լ��yоλ�����P���y�T��λ�����{���y����Ҫ�����������y�Uλ����̖����ݔ��ķ����y����̖���Կ�����ݔ����̖�����O����̖���������M�б��^����������ƫ��r����׃�䵽���ЙC����ݔ����̖��ʹ���ЙC���������Ķ��������y�Uλ����̖�c������ݔ����̖֮�g��һһ�����Pϵ����
����ʽ�� p��q��T———�c��λ���Y���������P�ą���
����N(X0)———�cָ��Ŀ��λ��X0�ɱ�����늴���
������ˣ��{���y�yо-�y�Uϵ�y�����W���̿Ɍ���
 ��(5)
��(5)2���yо-�y�Uϵ�y������φ��}���
��������ǰ�潨�����{���y�yо-�y�Uϵ�y�����W�����е����w��Fl(t)�o���Üʴ_�Ľ������_ʽ��ʾ��������Ҫͨ�^����Ԫ������Ϸ���Ӌ��õ������IJ���ANSYS12.0�е�CFDģ�K���{���y�Ȳ������M�з���Ӌ�㣬���Ƚ����Ȳ������Ď�ģ�ͣ�Ȼ��ͬ���r�µ��{���y�����M��Ӌ�㣬������w�����{���y�Ȳ�������ģ�Ϳ���ͨ�^���S��ģܛ��SolidWorks��������Ӌ�������r��Ҫ��ANSYS�е�CFDģ�K��������Ϸ����M�и��M��
����2.1��������Ϸ������Ͳ��E
����ͨ�^ANSYSܛ�������h���������yо-�y�Uϵ�y�M��������Ϸ������yо-�y�U�������w�������°l��λ�ƣ�λ�ƵĴ�С����׃�yо�Ƅӱ���߅�磬�Ķ��@��Ӱ��������Π������Ϸ���ͨ�^�ڽY�������еõ��yо�Ƅӱ���λ�ƣ������������������w������Ϸ����ĵ��Ͳ��E���£�
����(1)����������ģ�ͣ��������w�^����{���y�y�w�Y���^��
����(2)�������w�����h�����o���w�^���x���Ԫ��ͣ�߀Ҫ�_�������Δ�����������ģ�ͣ�ʩ��߅��l����
����(3)�����Y�������h������������w�����h�����O������Ϣ���ʂ䶨�x�Y�������h�����D�Q��Ԫ��Ͳ��O����Ԫ�x헣������w�^���Ԫ�O����NULL�����Y���^���x���Ԫ��ͣ�ʩ�ӽY��߅��l�������x���m���d�ɲ�������x헣�Ȼ����Y�������h���ļ���
����(4)���w/�Y�����ѭ�h���ڱ�ϵ�y�У���ڵ��ٶ����鿂�w�Ք��Ĝʄt�����ɴ�Flotran��������ٶȲ�ֵ���С�r�����Y������ʼFlotran�����O�õĵ����Δ�������һЩ���������^�õ��Ք����S������w������������ǰһ�����w�������A���؆��ӣ���ˣ������Δ�������һЩ���Y������ͬ��Ҳ��Ҫ�؆��ӡ����ڷǾ��Է��������c������؆�����ǰ�֏͵���ʼλ�á�����Ӌ��һ��������5����ϵ�������1��Flotran����������100�Σ��Եõ��^�ߵ��Ք����ȣ��S���4��Flotran����������40�Σ����ɝM�㾫��Ҫ��һ������260�Σ�ȡǰ250�Δ�����ǰ0.25s��λ��푑���
����2.2���yо-�y�Uϵ�y�������ģ���A��-У������㷨
���������{���y�yо�c�������|����Ƅӱ��棬ANSYSܛ���ĵ���������Ϸ����y�ԝM��Ӌ��Ҫ���IJ����A��-У���㷨[8]����Q�@�N��r�µ�������φ��}�������yо-�y�Uϵ�y�����W����(5)���A��-У���㷨���ɵó��yо-�y�Uϵ�y���A�y����У����Ӌ����_ʽ���քe��
�����A�y��
 ��(6)
��(6) ��(8)
��(8)������r������

����2.3���yо-�y�Uϵ�y�����������Ԫģ�ͽ���
����2.3.1���{���y�Ȳ�������ģ�̈́���
�����{���y�ăȲ����������{���y�Ȳ���M���w����ռ�Ŀ��g�����O�y�w���yо�DŽ��w��������߅�����y�w���yо�c���w������棬�y�w�c���w֮�g��������Dz��ӵģ����yо�c���w֮�g����������Ƅӵ�(�����̶��_���µ���Ӻ�׃�_�ȕr���Ƅ�)�����ڼ��O�yо�DŽ��w�������������������r����Ҫ���yо������ȥ�����ڲ�ͬ���_�ȣ�ֻ��Ҫ�������yоλ�ƵIJ�ͬλ����ȥ���ɣ������y�U��������Ӱ푱��^С�������ڽ�����ģ���к����y�U���{���y�ăȲ�����ģ����D3��ʾ��

�D3 �{���y�Ȳ�����ģ��
����2.3.2���W��
�������IJ������ɾW�ַ������ڄ��־W��֮ǰ����Ҫ�O�Æ�Ԫ��ͣ����錍�wģ�ͷ����Ԫ���ԣ������е�����ģ�Ͳ��õ���Fluid142��Ԫ���yо�c���w֮�g�����������׃�����^��������0.002�ľW�֣���������λ�y�w�c���w֮�g������棬��������0.004�ľW�֣��������ֽY�������І�Ԫ102306�������c20531�����W�ֽY����D4��ʾ��

�D4 ����ģ�;W��
����2.3.3���d��ʩ��
�����ھW��֮��Ҫ��ģ��ʩ���d���Լ�߅��l���������Ќ�ģ��ʩ�ӵľ��w�l�����£�
����(1)��ڣ����x������0.2��2.1MPa��
����(2)���ڣ����x������0.1MPa��
����(3)�̶�����l���������c�y�w���|������������w�����ٶȞ��㣬����λ�ƞ��㣬�������M���ڶ�����yо�܇���������⣬����߅�����ٶȺ�λ�ƾ����㡣
����(4)�Ƅӱ���l�����c�yо���|��������ϵ����w�ٶȺ�λ�Ƒ�ԓ�c�yо���\���ٶȺ�λ��һ�£������yо�oֹ�r��������ϵ����w�ٶȺ�λ�ƾ�����;���yо�\�ӕr���������ÿ�����c���κΕr�̵��ٶȺ�λ�ƴ�С���c�yо�ό������c���ٶȺ�λ�ƴ�С��ͬ�����ڱ���ֻ���]�yо�S���\�ӣ����������ᵽ��λ�ƺ��ٶȾ�ָ�S��λ�ƺ��S���ٶȣ�������λ�ƺ��ٶȶ����㡣
����(5)�����]�ض�׃���������漰�ύ�Q��
3���yо-�y�Uϵ�y������τӑB푑�����
����ͨ�^����yо-�y�Uϵ�y�������ģ�ͣ�����Ӌ���{���y�ڲ�ͬ߅��l�����yо�ܵ��ĄӑB���w���Լ��yо-�y�Uϵ�y�ĄӑBλ��푑���������λ�����{���y�yо��ӵ�Ӱ푣������y�Ƚ��|����ͬ�r���yо�ڹ̶��_�Ⱥ�׃�_�ȵ������r���ҳ��yо�ܵ��ĄӑB���cλ�ơ�����֮�g���Pϵ��
����3.1���y�T��λ�����yо-�y�Uϵ�y�ӑB푑���Ӱ�
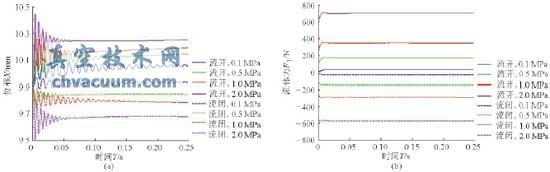
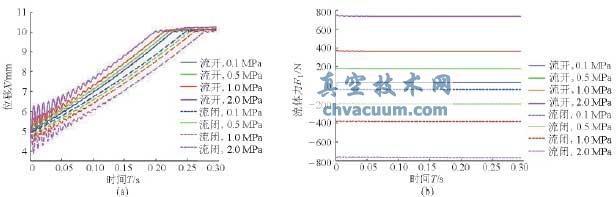
�������O�yо��Ŀ��λ��15mm̎���քe���M���ډ����0.1��0.5��1.0��2.0MPa�¹��������|��������_��B����ʼ����λ�ƞ�-0.1mm����ʼ�ٶȺͼ��ٶȾ����㣬��ʼ���w����50N���քe���ȷ��������y�T��λ���͛]���y�T��λ���r�yо-�y�Uϵ�y���yоλ�ƺ����w��푑�����D5��6��ʾ��
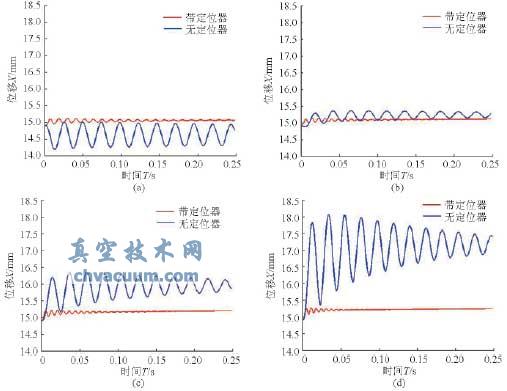
�D5 �����y�yо�����푑�����
(a)����0.1MPa(b)����0.5MPa(c)����1.0MPa(d)����2.0MPa
�����ɈD5�ɵã����ж�λ���ȟo��λ���r�yо��Ӳ���С�ö࣬����څ��Ŀ��ƽ��λ�õĕr�g���̡����^��(0.5��2.0MPa)�£��oՓ�Ƿ��ж�λ��������Խ���yо���ƫ�xĿ��λ��Խ�h���������Խ�����ж�λ�����{���y������B���鷀�������_��
�����ɈD6���Կ������S���������o��λ�����yо�ܵ������w������Ҳ�S֮�������ж�λ�����yо�ܵ������w��׃���tһֱ����ƽ����������u��С��ǰ�ߵľ�ֵ�^�ɵ��������ֵ��
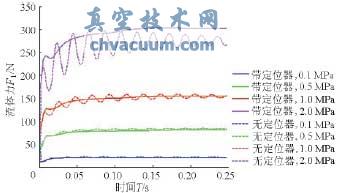
�D6 �����y�yо�ܵ������w������
����3.2�������y�ڹ̶��_���µĄӑB���Է���
�������O�{���y�y�Tȫ�Pλ�Þ�����ԭ�c��ȡ���Ϟ��������г̞�0(ȫ�Pλ��)��25mm(ȫ�_λ��)���M���ډ���׃��������0.1��2.0MPa�����|����քe�����_�����]�������yо��Ŀ��λ��(ָ���_��)��������ӕr�yо�������r��
����3.2.1����ͬ�������y�ӑB���Ե�Ӱ�
������ij��Ŀ��λ���£��yо���ܵ���ʼ�\�ӗl���Ĕ_�ӕr������ƽ��λ����������ӡ����O�yо�քe�ڲ�ͬĿ��λ��(3��5��10��15��20��25mm)�ºͲ�ͬ�M���ډ���(0.1��0.5��1.0��2.0MPa)�¹�������ʼ����λ�ƞ�-0.1mm����ʼ�ٶȺͼ��ٶȾ���0����ͬ���r�³�ʼ���w����ͬ�����]��λ�����ã��ó����|����ͬ�r�����y�yо��λ���c�yо�ܵ������w���S�r�g׃���v�̡��D7��ij�̶��_��(Ŀ��λ�ƞ�10mm)�r�yоλ���c�yо�������w���ĕr�g푑��v�̡��D8��λ�ơ������c���w�������S�Pϵ�D�Ͷ��S�Pϵ�D(����ڱ��^���D�����]�r�����w����ȡ��ֵ��ʾ)��
�D7 �̶��_�Ȳ�ͬ�����µ����푑�
(a)λ��푑�(b)���w��푑�
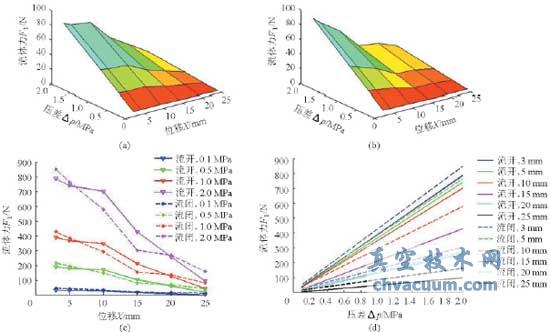
�D8 �ӑB���w���cλ�ơ�����֮�g���Pϵ
(a)���_��B���S��ʾ(b)���]��B���S��ʾ(c)λ�ƞ酢��(d)����酢��
�����ɈD8���Կ�����
����(1)�ڲ�ͬ��Ŀ��λ���£��oՓ���|��������_�������]�����w�������S����������������L��
����(2)�ڲ�ͬ���M���ډ����£��oՓ���|��������_�������]�����w���S��λ�Ƶ�����(�_������)���pС��
����(3)���^С����(0.1MPa)�£����_��B�µ����w������С�����]��B�µ����w��;���^��(0.5��2.0MPa)�£����y�T�ӽ�ȫ�_��ȫ�Pλ�Õr�����_��B�µ����w��С�����]��B�µ����w�������y�T�����gλ�Õr�����_��B�µ����w���������]��B�µ����w����
����3.2.2����ͬ�����yоλ��ƫ������Ӱ�
�����yо�ڲ�ͬ������څ��Ŀ���_�ȵ��^���У����H�����_�������O��Ŀ���_�Ȍ������yоλ��֮�g��һ����ƫ������������ͬ���λ�����yо�\�ӷ��棬���Եõ���ͬ���|����r�yоƫ�����c���λ��֮�g���Pϵ����D9��ʾ(����ڱ��^���D�����]�r��ƫ������ȡ��ֵ��ʾ)��
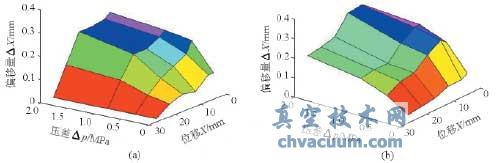
�D9 ƫ�����c���λ��֮�g���Pϵ
(a)���_��B(b)���]��B
�����ɈD9���Կ�����
����(1)���^С����(0.1MPa)�£����_��B���yоƫ����Ҫ�����]��B�µ�ƫ������;���^��(0.5��2.0MPa)�£����]��B�µ�ƫ�������wҪ�����_��B�µ�ƫ������;�Ҹ��N���r�µ�ƫ�����������S�ķ���(3%��5%)�ȣ��܉�M�㶨λ���ȡ�
����(2)��ͬһ��Ŀ��λ��̎������Խ��ƫ����Խ��
����(3)��ͬһ�����£�Ŀ��λ��Խ��ƫ����ԽС��
����3.3�������y��׃�_���µĄӑB���Է���
�����yо���ܵ����w���Ϳ��������Õr�����ij�ʼλ����Ŀ��λ���\�ӣ�����K������Ŀ��λ�ø�������ӡ����O�yо�\���^�̞�20��15mm(�_��׃С)��5��10mm(�_��׃��)���M���ډ���քe��0.1��0.5��1.0��2.0MPa����ʼ����λ�ƞ�-0.1mm����ʼ�ٶȺͼ��ٶȾ���0����ͬ���r�³�ʼ���w����ͬ�������]��λ�����ã��ó����|����ͬ�r�����y�yо��λ���c�yо�ܵ������w���S�r�g׃���v�̣���D10��11��ʾ��
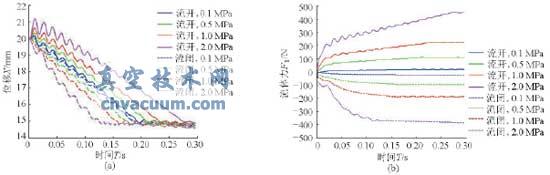
�D10 �_�Ȟ�20��15mm�r�ڲ�ͬ�����µ��yо���λ�ƺ����w��
(a)λ��푑�(b)���w��푑�
�����ɈD10��11���Կ�����
����(1)�yоλ�Əij�ʼλ������ʎ˥�p�ķ�ʽ���_Ŀ��λ�ã�����Ŀ��λ�ø�����������ӡ�
����(2)�yо�������\�ӜpС�_���^��(20��15mm)�У��������]����Ȳ������_�����yо���_Ŀ��λ�����Õr�g����;�����|�����]����r������Խ���yо�_��Ŀ��λ�����Õr�gԽ�̣������|�����_����r������Խ���yо�_��Ŀ��λ�����Õr�gԽ�L��
����(3)�yо�������\�������_���^��(5��10mm)�У��������_����Ȳ������]�����yо���_Ŀ��λ�����Õr�g����;�����|�����_����r������Խ���yо���_Ŀ��λ�����Õr�gԽ�̣������|�����]����r������Խ���yо�_��Ŀ��λ�����Õr�gԽ�L��
�D11 �_�Ȟ�5��10mm�r�ڲ�ͬ�����µ��yо���λ�ƺ����w��
(a)λ��푑�(b)���w��푑�
����(4)�yо�������\��(�_�ȜpС)�^���У��yо�ܵ������w���ij�ʼλ������ʎ˥�p�ķ�ʽ���_ƽ��λ�ã�����ƽ��λ�ø�����ӣ��ҵ��_ƽ��λ�����Õr�g�cλ�Ƶ��_Ŀ��λ�����Õr�g��ͬ;���|�����_����r������Խ���yо�ܵ������w���_��ƽ��λ�����Õr�gԽ�L;���|�����]����r������Խ���yо�ܵ������w���_��ƽ��λ�����Õr�gԽ��;���w�Ͽ�����ͬһ�����£��yо�����_����r�ܵ������w��Ҫ�����]����r�ܵ������w����
����(5)�{���y�������\��(�_������)�^���У��yо�ܵ������w��ʼ�K̎��ƽ��λ�ø�����������ͬһ�����£��yо�����]����r�ܵ������w�������_����r�ܵ������w����
4���YՓ
����(1)������һ�����]��λ�����õ��{���y�yо-�y�Uϵ�y������τ����Wģ�ͣ�������ANSYSܛ�����̶��_�Ⱥ�׃�_����r�����w��������_�����]��r�M���˄ӑB푑����������
����(2)�о��Y���������y�T��λ�����МpС�yоλ�����푑����yоλ��ƫ���������ã��x����m�Ķ�λ���������Ա��C�{���y�ӑB����̎�����à�B�����ڹ̶��_����r���oՓ���]��߀�����_�������yо���Bλ��ƫ�����Լ����w���S�������Ӻ�Ŀ��λ�ƜpС(�_�ȜpС)�������yо�ӑBλ���^�ɕr�g�S�������Ӷ��s�̣������_������r�yоλ��푑�����Ҫ�������]���������_�ȜpС��r���������]�����������_����r�yо�ӑBλ���^�ɕr�g���̣��������]����r������Խ���yо�ӑBλ���^�ɕr�gԽ�̣������_����r�t�෴;�����_��������r���yо�ӑBλ���^�ɕr�g�͉���֮�g���Pϵ�c�_�ȜpС��r�෴��