�_����ձ���Դ�yԇԭ����ϵ�y
�� �ڱ�����ի@���O���aƷ��,�_����ձ�����Y���o�������ٴ��h��Ҫ���̡��S�o�M�õ͵����c���V����ʹ�á����Ƕ����,�����_����ձõ���ӡ����^����aƷ����һ���IJ�ࡣ��M���������������h���������ߵ�Ҫ���Լ������_����ձ��ڇ������Ј��ĸ�������,�OӋ�����a�����_����ձþ����^�������ͽ���Ч�档Ҫ�����_����ձõ���,����Ҫ����������ݗ��������M�з��x���,������ҪԴ���䌦��������ؕ�I;ͬ�r,�_����ҪԴ��ݗ�䲿λ���ڱ��о�������,��ZJ2150A �_����ձ����о�����,�������y�����g�M��Դ���R�e�Ͷ�λ,���Mһ����ԓ�aƷ�����C���о��͵����OӋ�ṩ������
���y��ԭ��
�p�������V���y�����g��80 ��������ԁ�,���������ͨ�h���½����M��Դ���ʜyԇ��Դ��λ,�õ�Խ��Խ�V���đ��á����^��,��������һ�c̎�چ�λ�r�g�ȴ��^�c��������ֱ�Ć�λ��e����,����λ��e�����ʡ�ͨ�����f�����Ǖr����,�䶨�x��:

ʽ��p(t)����; u(t)���|����c�ٶ�, t��r�g��
�����p�������V�ɵõ����g����һ�c̎����ֵ :

ʽ��Gp1p2( f) ���p�����y�õ�����̖p1(t)��p2(t)�Ļ��V�ܶȺ���,Im{Gp1 p2(f)����ʾȡ��̓��,ρo ��՚��ܶ�, f���l��,Δr ���p�����g�ľ��x��
�������ǂ�ʸ��, �����y�O���ͨ�^�y���x��������]���j���ϵ�����Ӌ������]���j���Դݗ�������,�Ҳ����ⲿԴ��Ӱ푡�

ʽ��W����]���j���Դݗ�������; In ����]���j��S �ϵķ�������
���H�y���r,�������xɢ�c��,���ڷ��]���j�����xȡ�m�������Ĝy�c�yȡ��������Ӌ������,���ɵõ�Դݗ�书�ʵĸ��NӋ��խ���l�V�D�Ρ��ɴ˿�Ҋ,�������y�����g,���Ԝy���C�����w��ݗ�����ʵĴ�С,�Ķ����F�C������Դ�ķ��x����ꠡ�
ͬ�r,���ˌ����O��Y���OӋ�ı�����λ,���Ԍ����C���xȡ�m���Ĝy����,���y���愝�ֳɶ��S�W�j,�y�����W�j�y�c̎�ķ�����ֵ,ͨ�^�M��Ӌ��õ��S����λ�÷ֲ��ķ�ӳݗ��ߵ͵����S���D�κ͵������D��,�M���M�Мʴ_��Դ��λ��
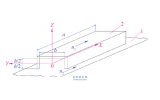
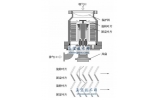
�y��ϵ�y���ñ���λ���Ƶ����yԇ����ϵ�y ,ԭ����DҊ�D1��
�D1 ���y��ԭ��D
ϵ�y��һ�挦����p������ǰ�÷Ŵ������ɵ���̽�^,����ȫ�̿ػ���늉��Ŵ�������ͨ�V�������O��늉��l������A/D�D�Q���Ķ�ܿ��c�C���ɡ��������Δr =12cm�Ă����քeʰȡ���g�����y�c������̖p1 ��p2 ,����̖���ŴV�����M�Д��ֲɼ�,������������Ӌ������y�c����ֵ,Ȼ�������ʷ�������Ϳ��g����������Ӌ�㱻�y���j���Դ�����ʻy�����ϵ����S���V�D�͵������D��
���P���£�