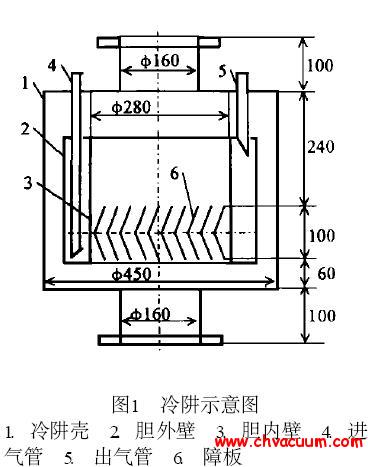
�͜ر�������ʼ�ͽY�����Д��
��������ʼ�l�����͜ر����È��϶���, ���B�m����^�́��f, һ��ֻҪ�M������ɂ��l���е�һ��, �͜رþ���Ҫ����:(1)�͜ر��ڟo�������ӟ�ؓ�ɕr, �������^�ضȳ��^20K ��һ�����^�ضȳ��^130K; (2) ������y�T�P�]5min��Ãȉ�����1×10-4Pa ���ϡ�
����һЩ�g�����^�́��f, ����������y�T�_���r, ���^�ضȱض��a�����Ӷ������^�ضȵĻ֏͕r�g(Recovery Time) �c�A�����Ě��w�������͜رõ����������w��(Crossover)���������Pϵ ,������@Щ��r��߀��Ҫ�������H��r�����S�IJ��ӕr�g�_�������l����
�����Ԅӵĵ͜ر�ϵ�y���f, �͜ر����a�̰��ṩ��һ�������ą����r�g, �����ڌ��H��r�IJ, ߀��Ҫ���������һ���Č��H�����Д��Ƿ���ԽY������, ��һЩ�Ԅӻ��̶��^�ߵĵ͜ر�ϵ�y�����Ԅ��M���Дࡣһ�����������M�е�ijһ�A�κ�, ���͜رôֳ鵽ijһ���m�ĉ���ֵ, �P�]�ֳ��y, �y���������������ʲ��c�������ȴ惦�Ľ��ֵ�M�Ќ���, ������M��l��, �t��Ҫ�^�m���͜ر��M�мӟᡣ
�@һ�^��Ҳ���Բ���һ���r�g֮��ĉ���ֵ���Дࡣ���]����ՠ�B���Ś�y���ľ���Ҫ��͕r�g�^�̵�Ҫ��, ��1Pa�����M�Мyԇ�DZ��^���m�ġ������üӟᎧ�ӟ��������ʽ, ���ڌ�����պ�ӟ�Ч������, ����M���Д���_ʼ�r�g, �ɴ��Д���g���r�g��Ҫ�������H��r�M�д_��, ���ñÃȼӟ��ӟ������r�o�迼�]�@�ɂ����}��
������C�͜رõ��\�к������^����, ��Ҫ�Oҕ�͜ر����^�Ĝض�, ����C�͜ر���ǰ�������õĚ����≺�ض�Ӌ������y�ط�����խ, ���܉�M��͜ر�ȫ�^�̵Ĝy����Ҫ, Ŀǰ����u������O�ܜضȂ����������档����O�ܜضȂ������Ĝy�^�g��1K�� 400K, ����͜������r���^��, �����ڵ͜رÜy�����S���`����Ⱦ��л��Q��, ���Ŀǰ�����Ԅӻ��̶��^�ߵ�����C�͜رþ����ù���O�ܜضȂ������M�МضȜy����Ŀǰ��δ�Ї��a��Ʒ������O�ܜضȂ��������ۡ������ڵ͜رõĜضȂ���������Ҫ�����^���Ĝy�^�g���^�õĜy�ؾ�����, ߀Ҫ��Ҫ���^�õķ����Ժͻ��Q, �Խ��ͮaƷ�ɱ��͜p�ٮaƷ�ľS�o�M�á���F���ضȂ����������^�õ��������O�ܜضȂ���������͜رõĜy��Ԫ��, �������^�õķ����Ժ͜y�ؾ���, �r��Ҳ�^��, Ŀǰ�яV�������ڌ��^�͜y�����Ϻ����I�Ԅӻ��x���о������Ƶ�С�͌�������F���ضȂ�����WZR201������Ч�y�^�g��1K��323K, �귀���Լs��0. 05K, ���������M�����S�`��R(0��) = 50±0.18 �r, ��0��Ļ��Q���ஔ�ض�±0. 5K, ��77K �r�s��±0. 3K, ��4. 2K �r�s��±0. 2K, ���ԺܺõĝM������C�͜رõĜy��Ҫ��������ԓ�`�����ֻ����0����r�º��Θ˶�, �����ʹ�óɱ��^�͡���F���ضȂ������ķǾ���У���Ͳ�ͬ��֮�g�Ļ��Q���}�ɲ����ھ���EEPROM �ķ�����Q��
�������P���£�