�]�h늿�׃�������õ��Ϸ������
�����錍�FҺ��׃���õ��]�h늿ز������������ܣ��о����ڸ����_�P�y��Ƕ��ʽ���������]�h늿�׃���������Ĺ����C�����������ԡ������˻���AMESim��Һ������ģ�ͺͻ���LabVIEW�Ŀ������������Ϸ���ķ����õ����]�h늿�׃��������ϵ�y�������������ȄӑBݔ����̖�ĸ��S푑��������Y�������]�h늿�׃�������Ì��F��Һ���õ��]�h׃�����ƣ��O�������Һ��׃���õĿ����`���ԡ�
��������
�������y׃�����������б�P����ϵ�y���������^����s�Ŀ����y�M�ͷ�����·���ɣ��@ʹ����Y�����s�ӹ��y�ȸߣ��ҽo����ϵ�y�������^��ķǾ������ء����҂��y׃�����y��ͬ�r���F�����������������ʵĿ��ƣ�Ҳ��������ݔ����̖(�牺����̖)�ĄӑB���S푑���
�������ˌ��FҺ��׃���õ��]�h���ƣ������������ƾ��Ⱥ��`���ԣ�һ�N���Ђ��������������ڸ����_�P�y��Ƕ��ʽ���������]�h늿ر�ϵ�y�����˳�������������ʿ���ȏS���Ƴ��˻��ڱ����y���]�h늿رîaƷ�������㽭��W���F�ݴ�W���к���ԴҺ���Ȇ�λ�����ڸ����_�P�y���]�h늿رõĽY���Ϳ��Ʒ����_չ��һ�����о�������Ԕ��ӑՓ���]�h늿�׃�������õĹ���ԭ�����������Ϸ���ķ�����������������˷��������Mһ���ĘәC�����ԇ�����Ҫ��ָ�����x��
1���]�h늿�׃�������õ�ԭ������
����1.1���]�h늿�׃�������õĹ���ԭ��
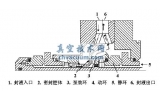
���������������]�h늿�׃�������õ�ϵ�yԭ����D1��ʾ��б�P�ɶ˷քe�B��һ�������ף�����Ļ�����ͨ�߉����Џ�λ���ɣ������λ���ƻ�����;����Ļ�����������e�^����ǻ�Ӹ����_�P�y�������_�P�y�ɿ������l��PWM��̖�M�п��ƣ��Q�����M����ƻ���ǻ���������Ķ����Fб�P��λ��λ�á������_�P�y�Ŀ���������PWM��̖��ռ�ձțQ����Ƕ��ʽ���������������㷨�����rӋ�㲢����PWM����ռ�ձȡ��ǶȂ������Á�z�yб�P�Č��r�A��ֵ�������䷴���o���������Եó��õĹ�������;�����������Á�z�y�õij��ډ������������o�������Á��M���]�h����Ӌ�㡣�����������ķ�����̖��Ƕ��ʽ���������Եõ��õĉ�������������ֵ�������c�O��ֵ�M�б��^֮����ֵ����PID �㷨��ݔ�룬��ɉ������������ʵ��]�h���ơ�������Ҫ�Ĺ�����������B�������ɳ�����ƣ������]�h늿رÿ��Ԍ��r�،�������B�M�и�׃���������ӑB��ݔ����̖�M�и��S푑������⣬������߀����CAN�����ӿڣ����Է���ؽ�����λӋ��C�Ŀ���ָ�Ҳ���Ԍ��õĹ��������l�͵������ϣ����㔵���ı����Լ����õıO�ء�
![�]�h늿�׃�������õ�ϵ�yԭ��D](/uploads/userup/1503/15130443Z61.jpg)
�D1 �]�h늿�׃�������õ�ϵ�yԭ��D
����1.2������ԭ��
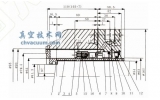
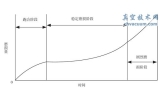
�����S��׃���������Љ������ơ��������ƺ��ʿ��ƵȲ�ͬ��׃�����ƹ��ܶ����Ԛw�Y�ڌ��������Ŀ��ƣ��]�h늿�׃����������ͨ�^�����_�P�y��б�P�A�ǵ�λ�ÿ��Ɓ팍�F�������Ŀ��ơ����IJ��õĸ����_�P�y���λ��ͨ�y���M��׃�������Ŀ��������������Ա�ʾ�飺
![�]�h늿�׃�������õ��Ϸ������](/uploads/userup/1503/1513064Q0A.jpg)
![�]�h늿�׃�������õ��Ϸ������](/uploads/userup/1503/15130ABJ9.jpg)
�������F�˱��������]�h늿�֮�Ϳ�����Ɍ����������ʵȅ����Ŀ��ơ�����̎�ں㉺�������������ߺ㹦�ʿ��Ơ�B�r����ϵ�y���Fؓ�d׃����ɔ_��ϵ�y���ڶ̕����Ӻ��{����ص�������B������֮�⣬�����]�h늿رõĹ���������ģʽ�ɳ�����ƣ���˿��Է���،��F���ӑBݔ����̖�ĸ�ۙ푑�������ڂ��y׃����������`���Դ����ߡ��]�h늿رõĄӑB���ƿ�D��D2��ʾ��
![�]�h늿رõĄӑB���ƿ�D](/uploads/userup/1503/1513045B436.jpg)
�D2 �]�h늿رõĄӑB���ƿ�D
2������ģ�ͽ���
����2.1��Һ��ϵ�y����ģ��
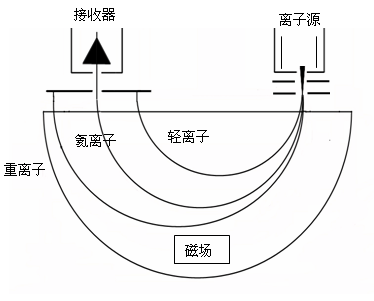
�����]�h늿ر�ϵ�y���Է֞����������w��б�P�������y��׃�������Ȳ��֣����@Щ���ַքe��ģ������ɱ�ϵ�y�����w���潨ģ������AMESim��Һ������ģ�����нӿ��Á��cLabVIEW�еĿ������M�Д��������γ��Ϸ��档����AMESim��Һ������ģ����D3��ʾ�����µ������Ξ�����_�P�y��б�P׃��ϵ�y���������ӿںͼ��dϵ�yģ�͡���Ҫ�ķ��慢�����1��ʾ��
![�]�h늿رõ�Һ������ģ�͈D](/uploads/userup/1503/15130514MH.jpg)
�D3 �]�h늿رõ�Һ������ģ�͈D
��1 ��Ҫ���慢����

����2.2��������ģ��
��������LabVIEW�Ŀ��������˙C������D4��ʾ��ԓ����ܛ���cAMESim��Һ������ģ���B��֮������ɉ�����������б�P�A�ǵȅ����Ĕ����ɼ������F�]�h�����㷨����ɺ㉺�����������ͺ㹦�ʵ��o�B���ơ����ГQ���ӑB����ģʽ֮���Ԍ��r�O��ݔ��������ʹ��׃����ϵ�y��ݔ����̖�ĄӑB���S푑���ܛ�������Ͽ����O�ñò�ͬ�Ĺ���ģʽ����ͬ�Ĺ������������ҿ��Ԍ��r�O�y�����������ȅ������@�cһ�����H�ı�ԇ��_�y��ϵ�y�O�����ƣ�����ȵ�ʹ�÷����N����ԇ

�D4 LabVIEW ����ܛ������
����LabVIEW��һ�N�D�����Z�ԣ��c���ƽ�������������һ�����Ƴ����c�ı��Z�Բ�ͬ����Lab⁃VIEW�еij����ԈD�˺͔���������ʽ�ʬF�������OӋ��������LabVIEW �������{��AMESim ģ�͵�dll�ļ����Á���f������Ȼ�����PID���߰�����]�h�����㷨��
3������Y������
��������ᘌ��]�h늿�׃�������õĹ���ģʽ�ͅ����ɳ�����Ƶ����c����Ҫ�����䌦�ӑBݔ�뉺�����������ʅ����r�ĸ��S푑��������D5���D6�͈D7�քe���]�h늿�׃�������Ì���׃���ĉ���ݔ�롢����ݔ�����ݔ��ĄӑB���S푑��������D5�Љ���ݔ���5��25MPa�ķ����������غ��½��ؕr��푑��������Ѕ^�e����������푑��r���ڰ�ȫ�����y�����ˉ��������^28MPa�����Գ��Fһ������ƽ�ļ�塣�D6�е�����ݔ���50��100L/min�ķ�����̖����Ҋϵ�y��������˺ܺõĄӑB���S���ɂ�߅�صĄӑB푑��r�g����0.1s�ԃȡ��D7�еĹ���ݔ��������10��50kW�ķ�������������ϵ�y�������{��������50��120L/min������ؓ�dϵ�y�������^С��ԭ����50kWݔ���ĕr���Է�ֵ����28MPaݔ����

�D5 ����ݔ��ĸ��S푑�����

�D6 ����ݔ��ĸ��S푑�����

�D7 ����ݔ��ĸ��S푑�����
4���YՓ
�������Ľ����˻���AMESim��LabVIEW���Ϸ���ģ�ͣ��о��˻��ڸ����_�P�y��Ƕ��ʽ���������]�h늿�׃�������á��Ϸ����ְl�]�˃ɿ�ܛ�����Ե����c��ʹ�÷���ģ�����N�����Hϵ�y������Y���������]�h늿�׃�����ڌ��F�㉺�����������ͺ㹦�ʵij�Ҏ����ģʽ֮�⣬߀���Ը����O����ݔ�녢���M�ЄӑB푑�����Ɍ�ݔ�������ĸ��S���O�������Һ��׃���õĿ����`���ԡ�