Һ�ӈ��ЙC���ڴ��ѻ��b�õđ���
�����Һ���ЙC�����п��Ɯʴ_�������Ժá��ɿ����^�ߵ����c���ڴ��b���Б���Խ��Խ�V�����ďĹ���ԭ�����\���г��F�Ć��}��̎���M����Փ����������������M�����������Һ���ЙC���İlչ�M�к����f����
�����S�����ѻ��b���\�����ڲ������L���P�I�O���\�з����ԡ��ɿ����܌��\������ֱ���Q�������ã��Һ���ЙC�����Ǵ��b�����P�I�{�������O��֮һ�������b�û��y�����y���C�M�o�~�{��ϵ�y����݆�C�{��ϵ�y�ϴ������á����ڷ�����ϵ�y�΄ӻ��y���ƴ�����ѭ�h�������C������ϵ�y������ƽ��;���������ڵ��p�ӻ��y����y�������������������C������ϵ�y�ĉ���ƽ��;���S���L�Cϵ�y�����Һ���ЙC�����o�~�Ƕ��M���{�����������Lϵ�y����;����݆�C�M�{����ϵ�y�Һ���ЙC��Ҳ���_ʼ���ã��{����݆�C�M�D���Կ��Ʒ���ϵ�y���������������a�l���£�Ҫ���Һ���ЙC��������B����������ƽ�����ɿ��Ըߣ��ڹ��Ϡ�B�����ʴ_�����������Ա�Ͷ����r����һ���ʴ_��ʹ�������wѸ���_���Ա�λ�ã����C�b�ð�ȫ�����o�C�M�����������Һ���ЙC�����\���еĆ��}��̎���M����̽ӑ������˾��w�ĸ��M������������lչ�����M���˺�����
1���Һ���ЙC���Ĺ���ԭ��
�����Һ���ЙC������늚����ϵ�y���Һ�ŷ��ס��ͱü�λ�Ƃ������ȽM�ɡ���늚����ϵ�yݔ��˽���4-20mAݔ��������̖��Ҏ��̎���D�Q��0-10V늉���̖��ͬ�r����λ�Ƃ������F���y�õČ��H�yλ�����^Ҏ��̎���D�Q��0—10V늉���̖���������ŷ��Ŵ����б��^�a����ֵ��̖����늉��Ŵ��ʷŴ�����Һ�ŷ��y���������\�ӷ��Ķ����ӈ��ЙC������Ҏ��λ�Ä�����ֱ��ݔ����̖�cλ�Ƃ�����������̖ƫ��ֵ���㣬�@�r�ŷ��y�Ŀ������Ҳ�ӽ��㣬�ŷ��y��̎����λ���oҺ����ݔ����ʹ���л���ͣ�����cݔ����̖��������λ���ϣ��Ķ��_���Һ���ЙC���Ԅӿ��Ƶ�Ŀ�ġ�
2�����y�����y�Һ���ЙC���\���й���̎�������M��ʩ
2.1��Һ������Ԫ���\���еĆ��}
2.1.1���Һ�ŷ��y
�����ŷ��y����Һ������Ԫ���Ƿdz��P�I��Ԫ�����������ܛQ�����ƾ��Ⱥ̈́ӑB�ķ����ԣ����Ŀɿ��ԛQ������������ϵ�y��ʹ�É��������������nj��^С��늹�����̖�D�Q���^���Һ������ݔ�������F��̖���/Һ�D�Q������ɷŴ����á�
���������Һ�ŷ��y���õ����p�������ʽ�Y�����䌦Һ�����坍��Ҫ���^�ߣ���횱��C�坍��NASI638A������7�������\���^�����׳��F�y�����F����Ɉ��ЙC���`���������صij��F�yλ��“����”����ɹ�ˇ���a�^�ӡ��F�A�������ܽY���ŷ��y�����^�࣬��Y���ϲ��ø�ʽ�����R�_�����w���ӣ������ܞ��Ȍ��O�����y�y�������ţ���һ�N�������������ɽM�������������y�����п���Ⱦ���������ɿ��Ըߡ��ֱ��ʸߵ����c���������������ܶ�����B�£��ŷ��yһ�㱣��ԭ�yλ�������ϱ�������“����”�F��ij��F����ȫ�����˺ܴ����ߡ�
�����ڌ��H�\���^����Һ����ʹ��Ҳ��Ӱ��ŷ��y�\�Р�B������֮һ���ڱ����^��ʹ��N32����Һ���ͣ��Ꭷ�^���ļ�ʹ��N46��ĥҺ���ͣ�Һ�����^�V������5um���ң��\���͜���20-50��֮�g����Һ���ͳ���ʹ��ǰ�������CҺ���ͽ���—�^�V��—����—��ѭ�h��С�r���ϣ�����Ͷ�ŷ��y������Һ������Ⱦ�ŷ��y��
2.1.2���y�����
����λ�Ƃ��������]·�·����ϵ�y�е���ҪԪ���������ܵĺÉ�ֱ��Ӱ푵�����ϵ�y�Ŀ��ƾ��ȺͿɿ��ԣ��FͶ�������û�Ƭ���ʽ��늸�ʽֱ������λ�Ƃ������̓���ʽ늸�ʽ�������ȡ�����������ݔ���yλ������̖��������̖�cݔ����̖���ŷ��Ŵ����D�Q��늉���̖���M�Ќ����γ�ݔ����̖�����ƈ��ЙC���Ą��������������F���ϕr���Һ���ЙC���a���`����ֱ��ϵ�y�iλ���y�����ķ���ҕ�ŷ��Ŵ������yλ��ۙ������ۙ�r�g���O��ֵ������
������Ƭ���ʽ��������Ҫ�������ڻ�Ƭ�c���Ƭ�Ӵ_֮̎�g�a��ĥ�p����ɽӴ_������ݔ����̖���S��������B���������@�N��ʽ�Ă����������^�࣬���M�и��M��tͶ�ÿɿ��Ե͡�����ʽ늸Ђ������������Ҫ��늚�o�̼��Ʉӡ���Ȧ�|�����}���ϻ��a���Ĺ��ϣ����\�й����^��Ƭ���ʽ�������͡�
��������ʽ늸о�Ȧ��������������̶����׃ȣ����������ԡ��ɿ������^�ߣ��\���г��F���}��Ҫ���ܷ��й©��Һ����й©�����ȣ���ɽӴ_������ӣ�ʹ�yλ������̖�a��ƫ����Д࣬ʹ�䲻������������
2.1.3���ŷ���
�����ŷ�������Ҫ���C���w�͉����ȸߣ�����DZ��C��Ͳ�c����֮�g�OС���g϶�͌������m��С�g϶�����C�����ܷ�h�Ŀɿ��ԡ�
�����\���г��F����Ҫ���}�ǻ����ܷ�h�ϻ��p�ģ������״��ͣ��m���ϳ��F�����^�ͣ����������ϬF���^�y�Д����ԭ�����ڵ��y�ͻ��y�ŷ��ĽY�����ܷ�h��ͬ�����ϵĬF��Ҳ�����^�������y�Ļ����U���p�ȴ��ڣ����y�Ļ����U�džȴ��ڣ����{����̖�o��(�_/�P)�r�����������{�������\�ӣ��������������ܷ�h�ϻ��p�ă��״��͌�ͨ�������׃ɂ��͉�ƽ�⣬���y�����ɂ���e��ͬ�����»��y������;�����y������e��ͬ(�����U�džȴ���)���o�����U�ȳ��܉����^�����y���л����U���\�ӣ�ֱ�����y�iλ�׃ɂ��M��ֹͣ�����y�\��λ�����iλ�O���ĸ�ۙ��������ۙ�r�g���������Ԯ������ܷ�h�ϻ��p�ĺ��y�Ĺ��ϬF���������{�������\�к�ֹͣ����;���y�Ĺ��ϬF���������{�������\�к����л����U���\�У�ֱ���iλ늴��y�����iλ���׃ɂ��_��ƽ��λ�ö�ֹͣ�\�ӡ�
2.1.4������Һ����(�ͱá�늴œQ���y)
����Һ������Һ��ϵ�y����Ҫ����Ԫ���������|���É�ֱ��Ӱ푵�Һ������ϵ�y�Ŀɿ��ԣ�����ʹ���^����LJ��a�~Ƭ�ã����͉����������ͷ�й©���{������խ�����������oʹ�á��S�o����O������������M��׃�������ã����������{�������������a���M�еģ����ݔ������ƽ�����������ܿɿ��������͡��\�������L�����c��늴œQ���y�ǿ��ƙC���д������ڵ�Ԫ��������F���ϵ��l���^��(�������iλ늴œQ���y)����Ҫ�������y�│����ԭ�����������|��Ⱦ�����������^�ij��e��ʹҺ���ͽ�늴œQ���y�����ͣ�����y���`�������˹��ϵęz���^�ף�й����ϵ�y��������_�ŷ��C�����ְ���늴œQ���y�ăɂșz��؏��ԣ��粻�������؏��C��늴œQ���y���������w��������b���ɡ�
2.2��늚�x��ϵ�y�Ĺ���
�����S���x��Ԫ���ļ��g������ߣ����ڃx��Ԫ���͵͜�����������������^��F�A�ΟoՓ���m��ʯ���Cе�S���a���Һ���ЙC��߀�ǾŽ��x��S���a�ĮaƷ���ŷ��Ŵ����|�������^�^�P��
3���Һ���ЙC���ڙC�M�o�~�{��ϵ�y�ϵđ���
3.1������ԭ��
���������Һ���ЙC����ʹ�÷����Ըߣ��{���`��ʹ�䑪�÷����U�F�����S���L�C�o�~�{��ϵ�yҲ���^�������Һ���ЙC������Ҫ������ʽ�飺�Һ�ŷ�������·��늴��{����·��ʹ�ã�ͨ�^�o�~�Ԅ�/�o�~�iλ���ГQ�����ЃɷN������B���o�~�ŷ�����ϵ�yҺ�����o�b��ͨ�^Һ���i�o��ʽ�������Һ�ŷ��y���M����·��ؓ�d��·�����S���L�C̎��������B�r��Һ���i늴œQ���y̎�ڌ�ͨ��B���Һ�ŷ�����ϵ�y�S�{������̖��ؓ�d��r���r�{���o�~�Ƕȣ��_���m���L���������ڷdz�ԭ��(�ŷ�����ϵ�y��ij����Ԫ���l�����ϣ��������ɔ_����)ʹ�o�~�Ƕ��c�O��ֵƫ���^�����ȫʧ�ؕr���iλ늴��y�Q���y���ͨ늣�ʹҺ���i̎���P�]��B���Д��Һ�ŷ��y�M����·��ؓ�d��·�����r���o�~�͵��i�����@�r����o�~�Ƕ��c��Ҫ���λ��ƫ���^���Ԇ�����һ늴œQ���y�{�������c�ӷ�ʽ���o�~�Ƕ��M�������������ŷ��������Ƅӣ�ʹ�o�~�Ƕ������pС���_��ָ����λ�á���ʹ�o�~������ȫʧ�أ������^�m�S���S���L�C������
3.2����ϵ�y��ȱ�c
�������ڿ��]����ȫ�\�е�Ҫ���o�~�Ƕ�25��;o��ͣ܇Ҫ���o�~��λ(һ����60������)�����Һ���ЙC��������̖�Gʧ��������̖�Gʧ�iλ���o��̖ƫ���iλ���ܣ���������o�~�ǶȰl���^���׃���r�o�iλ���ܣ�ֻ���˞��{�������iλ��ʹ��ϵ�y�İ�ȫ�Դ����[�����@�DZ�ϵ�y������ȱ�ݣ��@��Ҫʾ�Һ���ЙC���������ŷ��y�Ŀɿ��ԘO�ߣ�����ϵ�y�Ĺ���������Ҫ���C��
�������M�����ɽY�ϻ��y�����y����ϵ�y�������iλ늴��y���ڷ�����̖�cݔ����̖ƫ���^��r�M���iλ����Ͷ�Ա��r�Ԅӽ��i�������yλ������λ�á�
4���Һ���ЙC��ʹ�Î��c��Ҋ
4.1���P���Һ���ЙC���ڹ��ϔ�늠�B���iλ늴��y������ʽ���x���}
�������ڻ��y�����y�ڴ��b���е���Ҫ���ò��Զ���������ڹ��Ϡ�B���ЙC���İ�ȫ�����Ƿdz���Ҫ�ģ�Ҫ���]�������r���y�Ą�����r��һ����f�iλ늴œQ���y����늽��i������iλ�����C�ڹ��ϔ����r�±����yλ���⌦���a�a���^��Ӱ푣����@�͌�늴��y����늹�������Ҫ���^�ߣ�Ҫʹ�ÿɿ��Ը�늴œQ���y��
4.2��UPS�Դ�đ���
�������ֹ��늹��Ϻ��y�`�����Ͳ����{�Ġ�B�����Зl��������UPS�Դ��x������ϵ�y�ṩ�Դ���_����ϵ�yͣ늵Ĺ��Ϡ�B�£��������������͉������yλ�_����ȫλ�á�
4.3���S�o������
���������r�ŷ��Ŵ���������@ʾ10����������Ҫ���Դ늉����ŷ��y����늉���ƫ����̖�ȣ��Ž��x��S���@ʾ��������iλ늴��y�Ĺ�����B(������늽��i/�������iλ)�����ڲ����ˆT�IJ����;S�o����O����������ڹ����Д��������ֶΡ�
4.4���P���Һ���ЙC���P�I늚�x�����ư忨�ĸ��Q
�����S���b���\�����ڲ������L�����O��Ŀɿ��ԡ������Լ��z���^���е�ƽ����Ҫ����ߣ������ŷ��Ŵ����ϵăx�����ư忨���������Ŵ��ͷ��������b���_��ǰ���������{У�ꮅ�����M��ȫ�г��{ԇ�ϸ�����������a�аl��������Ҫ���Q�������{ԇ�Ŀ����Էdz�С����ʹ�����{���������ʴ_�Էdz��ͣ����Ҳ����M��ȫ�г��{ԇ����˽��h���b��ͣ���{ԇ�r���P�I���y�ʂ���K��ͬ�İ忨���{ԇ��һ��һ�䣬�_�����Ϻ�ƽ�����QͶ�á�
4.5���Ա���B���{����ʽ
�����Һ���ЙC�����Ա���B�µĹ�����ʽ����Ҫ��ͨ�^늴œQ���y�{�����Һ�ŷ��y�����ͬ�r�����{����ʽ�����Ѓ���ͬ�r�����{����ʽ����ɿ���һ��������ٶȿ죬��һ����_����ijһԪ���l�����ϕrҲ�ܱ��C�Ա�����������
4.6���Һ���ЙC�����ճ��{��
�����е��b�����y�矟�C��ڵ��y������·�p�ӻ��y���L��̎��һ��λ�ã�һ����������ش�λ��������һ��������ѭ�h���������װl��Ԫ�������F�������ЙC���M�н����Ե�С�����D�{�������C����ϵ�y�������\�С�
5�����ЙC���İlչ
�����S��Ӌ��C���g��څ���ƺ͏V�����ã������C���-Һϵ�y�M�п����ѳɞ�Cе�ИI���F�C�һ�w����һ�N��Ҫ�ֶΣ����ֿ����ڮ�ǰ���J���nj��F��Һ��ϵ�y���٣��߾��ȿ��Ƶ�������ķ���֮һ��
5.1������ʽ�����͈��ЙC��
�����S���ɾ��̿�������PLC����ϵ�y�Ĵ������ã��Կɾ��̿�������PLC�����������Ĉ��ЙC�����F��Ͷ�ã��乤�����c���£�
����(1)�����{���c������̖ͨ�^�����뷽ʽ��ݔ�롢ݔ��������̎��������ȫ���x��ȫ���ֿ��ƣ���Q��ԭģ�M��̖�ܭh����늴Ÿɔ_�Ć��}�����������Եõ��^����ߡ�
����(2)��ۙʧ�{������������̖׃�����yλ���\��څ�ݶ�������ʹ���i�������Ӝʴ_�������������iλ���o���ã����������ϵ�y�Ŀɿ��ԡ�
����(3)�������ŷ��y���Ԅ��{У���ܣ�ʹ�乤�������Եõ��^����ߡ�
����(4)�����@ʾ�ʴ_������������ÿ�����ό����������ϴ��a��ʹ�����Д��ʴ_����ߡ�
5.2��Һ���Ĕ��ֿ����OӋ
���������y��ֱ���c�C�ӿڶ��o��D/A�D�Q�b�ã��c�μ����ŷ��y�ͱ����y��ȣ����нY�����Σ���ˇ�Ժã��ɱ��ͣ�����Ⱦ�ԏ����؏����ܺã����������ɿ����ܺ�С�ȃ��c��������Ԅӿ���ϵ�y�Ъ���һ�á�
���������w���Ƶ��^�c�֣��ɷ֞��B�m���w���ƺ��}�_���w���ƃɷN�����B�m���w�����У����\��̎���Ĕ�����̖����D/A�D�Q��늚��Cе��̖�����^ģ�Mʽ����ͨ�^�y���������������磬�ɾ��ԷŴ������ŷ��y�ͱ����y��
������һ���棬�}�_���w������ͨ�^�cλ����̖��������һ�M�}�_��ֱ̖��ʹ�y����-ͨ�������γ��g����}�_���w���Ķ��_������ƽ������ݔ����Ŀ�ġ�
������2�������y�����܉���e��ͬ�ĆΗUʽҺ����(�D1)���yV1��V2�鳣�]��B��Һ���ײ��ӡ���V1��V2ͨ늕r���y�����_��Һ�������һ������Ƅӣ����Ƅ��ٶȵĿ����Ǹ���Ŀ��λ���c���Hλ��֮���PWM��̖�����������_��Ŀ�ģ���ֵ�pС���}�_����׃�̏Ķ��p�١�
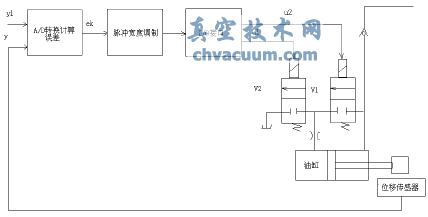
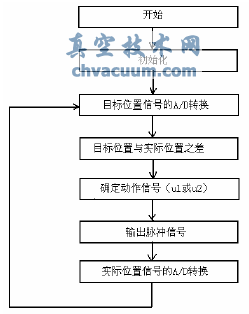
����PWM����λ�ó���Ļ���˼·�ǣ���Ŀ��λ����̖r�c���Hλ��y֮��e����ģ�M���̖��ͨ�^A/D�D�Q�������������ekݔ���C;��������kp��Ӌ�����ͨ�y���}���r�g(t=kpek)���ɴˁ��_��ͨ늕r�g;������ek�ķ�̖���ж������_���y(u1��u2)��������߿��Ƹ�λ�õľ��Ⱥͷ����ԣ������^����δ��ʹ�y��������С�}�_����t1��Ӌ��r�gt2��ݔ���S�C��ȡ�惦�����D����PWM�ٿv�ăɂ�����늴��y����Һ���ij����D��
�����M�딵�֕r���Ժ̿��Ɣ��ֻ��ѳɞ��˱�Ȼ�İlչڅ�ݣ����Һ���Ƽ��g�I���Ô����y���Fֱ�Ӕ��ֿ����ǔ��ֻ��������Q�������M�_չ���о�����ͨ�^�lչ�����͵�ϵ�Д����y�������䑪�����Һ����ϵ�y��ͨ�^���ֿ�������Һ��ϵ�yݔ���Ą����������Fֱ�Ӕ��ֿ��ƣ��Ķ��_���Һ���Ƽ��g���ֻ���Ŀ�ģ����γɾ�������֪�R�a��ġ����ص��Һ�����ŷ��Ŀ��Ʒ�����