��ӻ����{���y����������ԭ�������̎��
���������{���y��������������ԭ��ᘌ�����ԭ�����������y�T��λ���{ԇ�������O��ֵ�M���ģ���Q���y�T���Ӻ����������Ć��}��
�����ؑc���廯���ɷ�����˾�ڶ��״��b�ã��ϳɰ�ϵ�y����KBR���g������ϵ�y���ú��mStamicarbon���g����a��45�f���ϳɰ���80�f�����ء��ϳɰ��������b�����{���y��ӿ������õĸ��������ܔ��ֶ�λ����������λ���Ŀ��ƾ��ȱ��^�ߣ����繤ˇ�՚≺�s�C�������{���y(PV4050)���y�T�г̱��^�L�����{ԇ��ʹ���г��F���ӻ����������Ĺ��ϣ�Ӱ푿՚≺�s�C����������Լ����ډ���������;�������p������/�pݔ�������ܶ�λ��+�������ȸ������{���y���繤ˇ���g�ſ��y(HV1108��PV1032)�͉��������y(PV1040)�ȣ����{ԇ�^���г��F�����������ӬF���x�����ƻ�·���ӣ��M��Ӱ푹�ˇ�^�̿��ơ�
1����ӿ��ƻ�·ԭ��
������ӻ���ʽ�{���y��������һ����ò�ͬ�ڏ���ӻ���ʽ�Y�����@�N�Y��ͨ���a���^���ݔ����(����)�����ܿɿ����Y���o�����S���㡣�@��ϵ�y����1������ޣ�2���Q���y��1���iֹ�y��1��ֹ���y�����@��ϵ�y�У�ֹ���y�������DZ��֚����߉������iֹ�y�z�y���s�՚�Ĺ��≺���������s�՚�����iֹ�y���O��ֵ�r2���Q���yʧȥ�Ӊ����Q���y��������ޚ��M����һ���ڣ��ʹ�y�U������ʧ��λ�ã������һ���ڌ����w�ų�;ϵ�yʧ��r������w�eС������ʹ�y�T����������ʧ��λ�ã�ֻ�ܿ��⎧�ă�����a������Ҫ�Ě��w��HV1108��PV1032�ϸ��M��Ŀ������ɜp���y�o��һ���㶨�ĉ�����̖��ͨ�^������(������)�o���ЙC�����Ϛ���oһ���㶨�Ě≺����λ�����¸��⣬���F�{���y�Ĝʴ_��λ;PV1040�t���ɶ�λ�����ϡ�����ṩ������̖�o�������������ϡ���Ĺ��⣬���F�{���y�Ĝʴ_��λ��
�����D1����g�ſ��y�����������y��Դ���o�Д��r�y�T�P�](FC)��B�Ě�ӿ��ƻ�·���̡��ڛ]��̓���B�ӵĹܾ��B�ӕr��HV1108��PV1032��ӿ��ƻ�·;��ʹ��̓���B�ӵĹܾ��B�ӕrȡ���c�������B�ӵĜp���y���M���ڹܾ����t��PV1040��ӿ��ƻ�·��
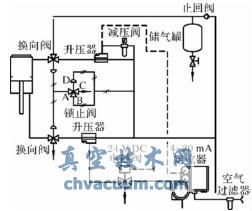
�D1 ���g�ſ��y�����������y��ӿ��ƻ�·����
2������ԭ�����
�������{ԇ�^���У��o����̖���F�y�T��λ�r�g�L����С�_�Ȳ��������yλƫ���ȬF��;��Ͷ��ʹ���г��F��ˇ���ƅ������������������Ӵ�ȹ��ϬF����ռ��g�W(http://smsksx.com/)�J����Ҫԭ�������ڶ�λ�������������O�������m���{ԇ����λ��
����������HV1108��PV1032��PV1040���������y�T�Ĺ���ԭ�����{ԇ�r��HARTͨ�����y�õĸ��y�T�Ĕ���Ҋ��1��3��
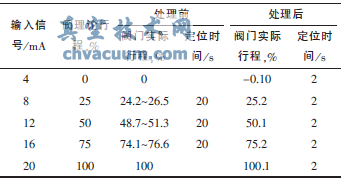
��1 HV1108�Ĝyԇ����
��2 PV1032�Ĝyԇ����
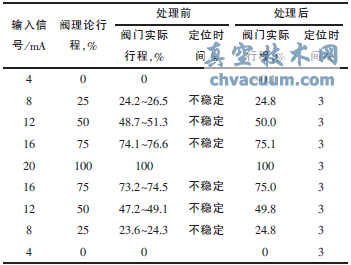
����ע��ݔ����̖�е�20mA���ٵ�4mA�ǃx���{���y�����г�׃���{������3ͬ����
��3 PV1040�Ĝyԇ����
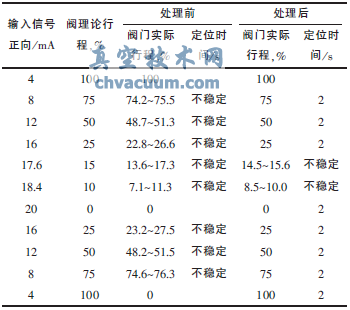
����������1��3�Ĝyԇ�������Կ�����̎�����y�T����Ҫ���}�ǣ�HV1108�����g�г̶�λ�r�g�^�L�����ӷ�����2%�ԃ�;PV1032�����g�г̷����Բ���ӷ�����2%���ҷ�����̖���F����ƫ���yλƫ�ͣ��_�y�rȫ�г̕r�g̫�L(�_23s);PV1040��С�_�Ȳ��������y�г̲����^��
3��̎����ʩ
����3.1����λ����������̎��
����1)�{�����������`���ȡ����������`�����{������������{�����������`����→�����Ԅ��O������→�ӑB���ԝM��→�Y�������{���ϸס����{���¸��M�������������ӛ䛣���������ͬ�r�{�����F��y����������IL-100��������(HV1108��PV1032)���{���y���{������������y���Á����ƿ՚��������������`����(��y��ȫ�P�])��r��D����y1.5Ȧ�����`���ȡ�������̖��������PV1040�Ĉ��ϣ�����r��D����y�������`���ȡ�
����2)��λ�������{�����ӑB���ԅ����x�Q�������y��PIDӋ�ㅢ����ͨ�^�x����ЙC���ijߴ������y�T�IJ�������ͨ�^HART375ͨ�������x��[Mainmenu](���ˆ�)—[Config&Calib](���ú͘˶�)—[Dynamicchara](�ӑB����)—[Actuatorsize](���ЙC���ߴ�)���ą���0��9(PARAM0toPARAM9)�x��_�J���ЙC���ߴ磬�^���y�T���yλ�ķ����ԣ��x������õ�һ���M�б��档�������������{���y��һ���x��PARAM1��PARAM9Ч�����^�á�
����3)Ħ�������x���ڶ�λ���������x��Glandpacking(�����������)���x��HEAVY��MEDIUM��LIGHT(�أ��л��p)�������y�T���ܷ����ϣ�����ʯī���ϵ�һ���xHEAVY��F4�����xLIGHT��Ҳ�����x��HEAVY��MEDIUM��LIGHT�^���yλ�ӑB���ԣ��x����õ�һ�����档�����y�THV1108/PV1032/1040����MEDIUM�Ğ�HEAVY��ӑB�����������@����
����4)PV1032�y�T��λ�����bλ���x�������y�T���F����ƫ��������r���{����λ���İ��bλ�ã�ˮƽ���ƣ����C�y�T��50%�yλ�r�����U��ˮƽ��
����5)�����x��õą�������M�б��棬���λ���M���Ԅ�У��(������)���yԇ�y�T�ĄӑB���ԡ�
����3.2����
�����ı�1��3���Կ�������ȡ���y�T��λ�����������Ͱ��bλ���M���{����̎����ʩ�����������˶�λ���������������ϡ�PV1040��С�_������1%~1.5%�IJ��ӣ������ڹ�ˇ�_܇̎��r�g�^�̣��]����ȫ�{������Ѡ�B������ʹ���^�����܉�M�㹤ˇʹ��Ҫ��
������ˇ�՚≺�s�C�������{���yPV4050(��ӿ���ԭ���cPV1040��࣬���iֹ�yǰ��늴��y��������B�������דQ���y�ӿڣ��������M�����ڶ����ЃɽM������)�ڿ՚≺�s�C�\���е��yλ9%�r�\�ж��ܷ������H0.5%�IJ��ӷ�������ȫ�M�㹤ˇʹ��Ҫ��
4���Y���Z
���������{���y���������������ر��^�࣬�{����λ�����܆�һ���x���Ԅ������������ϣ����ͨ�^�ĸ����������{����λ���Ȳ��O�úͰ��bλ�õ��ֶΣ�ȥ��Q�{���y�IJ������Ԇ��}��ʹ�{���y̎����ѵĹ�����B��





