���S���D���������������Cе�Ϳ����о�
����ԭ�̓��ޙCе��ϴ���I�в����ڸ���ϵć����a�����S���D���������քe������M�Л_ˢ��ʹ���e���̵�ԭ�͵���������ܽ⣬Ó�x�������Ĺޱڱ��棬�_����ϴ��Ŀ�ġ��P�ߏęCе��ϴ��Ҫ�γɵ�����܉�E���֣�ͨ�^���Y�������^�\�ӡ��X݆����ϵ�y����ӿ���ϵ�y�ķ����о����OӋ���߂�����Y�������S���D����ʹ���܉�M����ϴ���̵���Ҫ������܉�E��������֪������Ҫ�_���Ĺ��ܵ���r�·������^���\��ģʽ�����^�\�ӷ���������܉�E�����ĽY������ݔ��l�����������Y���ϵĎ��Pϵ���X݆����ϵ�y�OӋ���\�ӷ�������A��Ӌ������^���D�ٶȺ��c���D�S���A���ٶ�֮�g���Pϵ�����_���m���ĽY���͂��ӱȡ���ӿ���ϵ�y�OӋ�����ϵ�y�ṩ���m�Ą������Լ����Ƈ��^��һ���ĽǶȷ����Ȕ[�ӡ�ͨ�^�������P�I���g�ķ����о����OӋ���M��ԭ�̓��ޙCе��ϴ������Ҫ�����S���D������
1������
�����҇�Ŀǰ�ѽ��ɞ������һʯ�����M�����ʯ�͵đ��Ժ��̘I����������������ͻ�w���M��������ȫ�yӋ�ѽ�Ͷ�ú��_ʼ���O�ă��濂���_��1 �|�����ϣ����҆��_����Ҏ������϶���5 �� 10 �fm3���F����ʯ��ij��I�����о�15 �� 20�fm3 �ă��ޡ����ڃ����ԭ�������Ҿ�����ȼ���ױ�����Ⱦ�h�������ԣ�����ԭ�̓���һ���l���¹ʣ�����ɇ��صĽ����pʧ�ͭh����Ⱦ�����ҿ���ᄳ��ش��ļ���ը�¹ʡ����˴_�����������Լ���ʹ�ð�ȫ����ԭ�̓��Č��H�\�I�У���Ҫ����ͣ�a�z�ޡ��Ї�ʯ����Ȼ���ИI�˜�SY/T 5921—2002 Ҏ��: �½���һ���_�ޙz�ĕr�g���L�����^10 �꣬�ڶ��μ��Ժ��_�ޙz������һ���5 �� 7 �ꡣԭ�̓����ڙz��ǰ�����ϴ�Ƀ������Ҳ�������YԴ���M�ͭh����Ⱦ��߀Ҫ�_����ϴ�^�̵İ�ȫ�����ԭ�͙Cе��ϴϵ�y���\��������������̽ӑ�����S���D��������ԓϵ�y�ĺ����O�䡣ԭ�̓��ޙCе��ϴ���I�в����ڸ���ϵć����a�����S���D���������քe������M�Л_ˢ��ʹ���e���̵�ԭ�͵���������ܽ⣬Ó�x�������Ĺޱڱ��棬�_����ϴ��Ŀ�ġ��ęCе��ϴ��Ҫ�γɵ�����܉�E�����M�з����������\�ӌWԭ�����Cе������Փ�͇��似�g��֪�R�������OӋ���M��ԭ�̓��ޙCе��ϴ��������Ҫ�ć����Y�����a������Ҫ�����S���D������
2������܉�E����
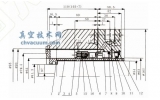
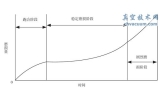
����ԭ�̓��ޙCе��ϴ���I�Ќ��������b�ڸ�픵�֧�����У����^̎�ڸ���c��֮�g�����^���D��܉�E��D1 ��ʾ��

�D1 ��������܉�E
��������ϴ��Ŀ�ij��l��Ҫ��2 �N�^�g��ϴģʽ( �ײ���ϴģʽ��픲���ϴģʽ) �Լ�ȫ��λ��ϴģʽ��
������ռ��g�W(smsksx.com)�J��ײ���ϴģʽ: ���ڸ��P���ĸ�픵��ľ��x�̣ܶ�һ����1 �� 2m�����Ԯ����^�c��ֱ�������ɵĊA�Ǻ�С�r( 45°�ԃ�) �������ڵײ����w�ķ���Ҳ��С���@���ֺ�С����e�����ɲ���������λ�õ������������a�����������w������ȫ��λ��ϴģʽ�r�M����ϴ���ɴˣ��ч��^���[�ӵĘO��λ���O��45°�DZ��^�����ġ������^�c��ֱ����ĊA�Ǐ�45° ���ϔ[�ӕr����Ҫ���^ͬ�r�@��ֱ�S�������D�\�ӣ��t���^�����������ڵ������γɏă���u����Uչ��������܉�E���ڊA��С��90°�ķ�������������ֱ���ڵ������зdz��õě_ˢ��ϴЧ����������ʹ�����ܴM���h��λ�ã��������^���ϔ[�ӵĘO��λ���O��105°���˕r�����钁�タ���mȻ�װ�Ĵ�����p��������������h�ģ�ͬ�r�����ڂȱڸ����ć������Ԍ��ȱ��γɺܺõ���ϴЧ�����ɴ˵ó��ײ���ϴģʽ�r��ϴ܉�E��45° �� 105°�����ȵ�������܉�E��
����픲���ϴģʽ: �ײ���ϴģʽ�r�Ĕ[���ϘO�ޞ�105°��������ϴ�r�M�����w�����еą^��ͬ�r105°�_ʼ������ӣ��������ɴ�픲�������픲���ϴģʽ���O��λ�ö���105°����105°�_ʼ���^���ϔ[�ӣ�������픰����γ�������ȵ�������܉�E�������ڽY���ϵ����Ƈ��^�c�������S���������γ�180°�����Ҫ���F���^���S���D��Ҫ���^�c������ͨ�^б����ϣ����^�@б����S���[�Ӻ�ͬ�r�@�����ܵ��S�����D�����Ԯ����^�@б����S���D�^180°�r���^�c�������S�����ɊA�Ǟ�135°�����^���ڇ��^�c픰���x�dz�����135° �� 180°�����Ȟ�һ���dz�С����e��ͨ�^�����ć������ã������������ć�����ϴ���@������e������픲���ϴģʽ�r����ϴ܉�E��105° �� 135°�����ȵ�������܉�E��
3�����S���D�����Y���OӋ
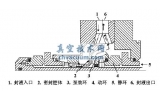
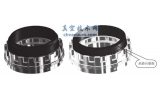
���������ό�ԭ�̓��ޙCе��ϴ���I�Ї�������Ҫ�γɵ���ϴ܉�E�ķ������OӋ�����ĽY����D2 ��ʾ��

�D2 ���S���D�����Y��
�������S���D�����ɚ���R�_���p�ٙC���X݆����ϵ�y���Ƕ�ָʾ�������ܡ����S�����S�����^�Լ���ӿ���ϵ�y�ȽM�ɡ�����R�_ݔ���Ą������p�ٙC�p�ٺ����X݆����ϵ�y�քe���f�o���S�̓��S�����S�γɇ��^�@�����S�������D�\��———���D�����S�����D�γɇ��^�@�����S�������D�\��———���D�����ɚ�ӿ���ϵ�y���Ƈ��^��һ���Ƕȷ����Ȕ[�ӡ�
7���Y�Z
����ԭ�̓��ޙCе��ϴ���������S���D��������K�Ĉ��ЙC��������γɝM����ϴ��Ҫ����ϴ܉�E�����F������һ���Ƕȷ����ȷ�����ϴ��ȫ��λ��ϴģʽ�Ĺ��ܲ����ڲ�ͬģʽ�g�ГQ���P�I�ļ��g�y�c���P�ߌ���ϴ܉�E�͇��^���\���M���˷������������w�Y�����X݆����ϵ�y����ӿ���ϵ�y���OӋ�M���˺�Ҫ���U����Փ������ϴ�������S���D�����ij����OӋ�����S���D�����ѳɹ�������ԭ�̓��ޙCе��ϴ���̣����½��¹����悺�����ʯ�̓������ԭ�̓�����ϴ���̵ȣ���C�˷������OӋ�ǿƌW�ġ�