����ۙ�y��(PTV)���g�����ڶ������yԇ�еđ���
��������ۙ�y�ټ�PTV�����ǽ�����ܵ��^���Pע��һ�N������ȫ���yԇ���g������ͨ�^�īI�C�����Y��ԓ�����������Mչ�����w����ԇ��b�Ø��ɡ��������D����̎��������ƥ���㷨�ķ�����c�Ȍ��}���ݣ����،�����ƥ���M����ӑՓ�����Y�Ϲ��̑��Ì���������ʹ��ԓ�����r��ע��Ć��}��
1��ǰ��
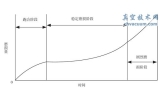
����������������Ȼ�缰���I���a(�e���^�̹��I)�����ձ�ĬF��֮һ���о������wϵ�и�����\�Ӽ�������Ҏ�ɼ����Փ���F�����x�����N�yԇ�����ӳ����F������ۙ�y�ٷ���(PTV)���������H����ɫ��һ�N��ԓ��������ͨ�^ۙ�����ӵ��\��܉�EӋ�����ٶȣ�����Lagrange���������܉F�^�ߵĿ��g���ȣ�����������Ӝyԇ�I��õ��ˏV���đ��á�
2������ۙ�y�ٷ���
��������ۙ�y�ٿ�ͨ�^2�N��ʽ���F:�������ɼ��ġ��ع�r�g�^�̵Ķ����D����ƥ��ͬһ��������Ӌ����λ��(�ٶ�)����Ӌ���^�ع�r�g�µ����ӹ�W܉�E�L�ȡ��M�ܺ��߳ɱ��͡����r�ԏ����������㣬���侫�Ⱥ�̎����s���ӵ�������δ�õ��J�ɣ�Ŀǰ�о����`��ǰ����ռ�^�����������ć��@�@һ�PTV���gչ�_����̎��“����”�ȿ������B�m���ʾۙ����Ҳ�����Ƿ�ɢ�࣬һЩ���w̎���ϵIJ�e���ں��Ľ�B��
����2.1�������ɼ�
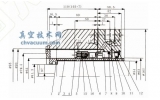
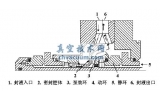
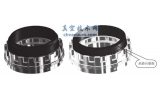
����PTV�y�ٵ�Ӳ��ϵ�y�����wͨ����ʾۙ�����ɢ��ע���O�䡢��Դ���D��ɼ��O�䡢ͨ���O��Ș��ɡ����wͨ�����о���������һЩ���͵����Ӱ����L����ˮ�۵�;�M��һ��Ҫ���С���w�w����Һ�μ����ݾ��������B�m���ʾۙ��������ע������֮��һ����Ҫ���T���O�䡣��Ȼ������PTV������K̎���Č����ǔ��ֈD����˹�Դ���D��ɼ��O����Ӳ��ϵ�y�ĺ��ġ���Դ�ķN������⡢�u�؟��⡢LED���⼰X�侀�ȣ������Լ����^�鳣�ã��ɷ֞��B�m���}�_��ʽ;���ˌ���Դ�a���Ĺ��M��̎����ʹ֮�M�㲨�L����λ���Π��Ҫ��PTV�yԇϵ�y��߀�����b�V�R�������R���R�ȹ�WԪ�����D��ɼ��O����Ҫ��CCD��CMOS�͵ĸ��N�������C�������M��������Ӝyԇ��Ҫ�����^�ߵĸ��ٔ��������C�đ��ò������ӡ�
����PTV�y�ٿ���2Dƽ���3D���g���M�У�ǰ��ֻ��Ҫһ�_���C���ɼ��D��r���C��W���S��ֱ��ƽ���Դ;�����܉������M�и������Ŀ̮�������Ӳ�����ú͔���̎������Ҫ����ߡ�3DPTV��Ӳ���ܘ�����2���Cϵ�y��3���Cϵ�y��4���Cϵ�y��1���C-�෴���Rϵ�y�ȡ����о���ָ����ֻ�в���3�_���������C������Ч�ر���ͬ���D�����ӿ��gƥ���ģ���ԡ������C-�෴���Rϵ�y�����Ɍ��F�����Cϵ�y�Ĺ��ܣ�Ȼ���p����Ӳ���M�á�ʡ�s�˔���ͬ����ֵ���Mһ��̽���c�lչ��
����Kraizer�������һ�N���rPTV���g���c���y������ͬ��ԓ���g�Д������C���ìF���ɾ����T���(FieldProgrammableGateArray��FPGA)���D���M��ǰ̎�����H��̎�����“����”������Ϣ���LjD��ͨ�^�W���ھ����f�o��X�M�к��mӋ�㣬�����˷��صĂ�ݔ�΄գ�������Ӳ����Ҫ�������̎���ٶȣ��m���c�h�̿��ƺ͌����W�j�Y��ʹ�á�
����2.2������̎��
����2.2.1��ǰ̎��
����(1)�D���xɢ��ȥ��
�����P�ڔ��ֈD������ȥ�����g�ѽ��^����죬��Ҫ��ͨ�^��ͨ�V����pȥ�����ȷ�ʽ���F����̎���c٘����
����(2)����������Ϣ����ȡ
����PTV�y����ᘌ��������M�еģ������Ҫ�M���ܱ����yԇ���ӵ���Ҫ������Ϣ�������������ˡ��ߴ硢���ȡ��ɫ�����Ȅ����ȡ�����ȡ��������֮ǰ������Ҫ�M�����ӵ��R�e���ָ��ε��k���dž��ֵ�����b�چ��ֵ����̎�������دB���ӺͷǾ�����յĈD������б��^���@�ľ����ԣ��о��߂�������˶��ֵ�����ӑB�ֵ���ȣ���һ���̶��ϸ��M�˷ָ�Ч����������ģ������һ�N�^�鳣�õķ�������Ҫ���ھ��ߴ���֪�����ӈD����R�e�ָ���⣬���g/��Û�����ǽ����^���Pע��һ�N������Cardwellͨ�^̎�팍���C����ԓ���������^�����܉�ɿ��طָ���s�����ӈD�@ȡ���ӵ��������˺ͳߴ�ĺ�������ͨ�^����Ӌ�����õ����ӵijߴ磬��ͨ�^Ӌ�����������ĵõ��������ˡ�Adrian��Yaoָ�������ڝM������s�����ߴ�s��10μm���������ӈD�������Ƚ��Ʒ��϶��S��˹�ֲ������@���YՓ�Ļ��A�ϣ��о��������һϵ�з����_�����ӵ����ĺͳߴ磬�������c�M�Ϸ�����С���˔M�Ϸ������c�M�Ϸ����e�֔M�Ϸ�����Ӌ�㾫�Ȳ�����ߡ�
����2.2.2������ƥ��
�������_��ǰ�D���е�ͬһ��������(�Q��r�gƥ��)����_��3D�b�ö���ͬ���D���е�ͬһ��������(�Q����gƥ������S�ؘ�)���@һ�h����PTV�����ĺ��ģ������������һֱ�njW���Pע�����c�����ڕr�gƥ�䣬�㷨�����õ�����������ϢԽ�࣬�ʴ_ƥ��Ŀ�����Խ��;Ȼ�����b�ڶ�������Ϣƥ��Ӌ�㹤����ƫ��Ŀǰ�����㷨����Ҫͨ�^λ����Ϣ�M������ƥ�䣬������ʩ��ʽ�ɴ��·֞�3�N:
����(1)���P��㷨
������ԭ���c���ӈD��y��(PIV)�����P�㷨���ƣ��^�e����PTV�P�Ĵ����Ԇ����ӡ�����Ҏ�t�ֲ��Ĺ��c�����Ą��������⣬���M�����PӋ��ǰ���茦�D���M�ж�ֵ��̎��������ַQ���ֵ�D���P����BICC��
����(2)�����R���\�ӵĽ���㷨
�����@һ��㷨��Ŀǰ���w�yԇ�����е������������Ľ��ʄt��Ҫ����:����ٶȼs�����ٶ��B�m׃���������^���\�����ơ�ƥ��һ�µȡ������ڵ��ʹ��������^���Ď��㷨����ʩ�^����s���ҟo��̎��Ɏ�PTV�ĈD�������Baek��Lee���������ɳ��㷨����Ѹ����PTV�yԇ�I��õ��ƏV������Ҫ���E����:
����1)ᘌ�ǰһ���D���е�����i���������λ���ֵRm�_�������c��ƥ��ĺ�һ���D���еĺ��x���Ӽ�Sm��ͬ�r������һ���x�ֵRn�_��ǰһ���D�����c����i�������l�������\�ӵą��x���Ӽ�Sn;
����2)���]���ӟoƥ��Ŀ����ԣ��������ʚwһ��ԭ����ʼ������i�c���x���Ӽ�Sm�е�Ԫ��jƥ��ĸ���Pij;
����3)������i�cjƥ��r����λ��ʸ��Rij�����O����k��i�ą��x���Ӽ��е�һ��Ԫ�أ��t��k�c��һ���D���е�����lƥ�䌦����λ��ʸ��Rkl�cRij֮���ģС���ֵRp�r���t�J���һƥ��Ĵ��ڏ�����ǰһƥ������Ŀ��ܣ���һ�������Pϵʽ�o��Pkl��Pij��Ӱ�;
����4)�O��ƥ������ֵPt����Pij>Pt�r���J��ԓƥ�������Pij����׃������˽��^��ε����õ�ǰһ������һ���D�������ӵ���ȫƥ����r��
3�������e��
����3.1���Lɳݔ�\
�����Lɳݔ�\��������ص�ɳĮ�����}�е��P�I�����F���b��ԓ�F��ʮ�֏��s�����yͨ�^��Փ�����ʴ_���������ò�ͬ�ֶΡ�����PTV�����M�е�ԇ��о�������ҕ�������Ը��������C��z��C���B�m��Դ�M�е��B�m�r�gPTV�y����Ҫ����ɳ���S�Ƽ������\��Ҏ�ɡ��e��ɳ���g��ɳ���c��������g���õ��о�;������ͨCCD/CMOS���������C���}�_��Դ�M�е�ɳ���ٶȵăɎ�PTV�y�����ɷ�����c�՚�����ٶȜyԇ�ֶ�(��Ƥ�йܡ�PIV��)�Y�ϣ��@�Ã�����\����Ϣ�����������g���p��������ú��Ў������Lɳݔ�\��PTV�y��һ�����Qֱƽ����M�У��M���ЌW��ָ��ɳ�������ό������S�\��;��һ��ֵ��ע��Ć��}���S�Ƶӵ�ɳ���ֲ��ܶȷdz����֮�g����ײ�l�����\�Ӳ�Ҏ�ɣ������@���^��“����”(��ɳ��)��ƥ���^�����y��
����3.2����������
���������ݵĶ��������ڻ��W���h���������^�鳣Ҋ���ڏ�����������Ӝp��ȶ�N���϶��Б��á��M�ܚ��ݺ�ɳ��ͬ�ٷ�ɢ�࣬��ǰ��һ��ߴ��^����������׃�κ��دB���\���ٶ��^���������PTV�y�ٵČ�ʩ�����c���߲�e���@��ͨ����̎�����E��ȥ���D�����_�����ݵ�݆�������D���M�ж�ֵ����Ӌ������ݵĎ����ģ�����M������“����”��ƥ�䡣���ښ��ݳߴ���ٶ��������_ƥ���y�Ȳ���;����֮ǰ�ĈD��̎���^�����ɳ�����s�������׃�Ε��ڜy�ٽY���������`��@Щ�ڌ��`�ж���Ҫע��ġ�
4���Y�Z
��������ۙ�y��(PTV)��һ�N���ÏV�������d�������yԇ���g���侫���c�����ɼ���̎���Ķ����h�����P���ڌ��`�Б��Y�Ϝyԇ���������_�����w��ʩ���E�ͷ�����