����UG�Ŀ���݆���OӋ�c�������
������M����֫�����ߺ������˵Ŀ���呟���Ҫ��ͨ�^��֫�w�\�����Է��������������B�U�C�����OӋ���Ⱦ�����݆ͨ�εĴ������ܡ������M��֫�w�����\��呟��Ŀ���݆�Ρ����Ã��ׂ��әC�����քe�������w����֫�w���\�ӣ��ԝM��֫�w�\�ӵąf�{�ԡ�����UG ܛ��������݆���M�����S��ģ���\�ӷ���������Mһ�����OӋ�����M�Ѓ�����ʹ��Y����������ȫ���m��
����݆������֫�����ߺ������˵Ĵ������ߣ��N��^�١����܆�һ����݆ͨ��ֻ���д������ܣ�ʹ����֫�w�ò�����Ч�\���c呟�����֫�w����呟��ܲ���������݆�ηN��^�ࡣ�����д����Ϳ��̓��ù��ܵ�݆�ηN��^�١�����݆�����OӋ��ʹ���^���У�����ֿ��]���w�������W���Ժ��˙C���̌W���}�����ڴˣ�����-�C-�h��ϵ�y�У��OӋ��һ�����/���̓���݆�Σ��ԝM��֫�w�����ߺ�������ʹ��݆���M�п���呟�����Ҫ��
��������UG ������݆���M�����S��ģ���\�ӷ����������OӋ�������Ķ���Ч���ͮaƷ���_�l�ɱ����s���_�l���ڡ�
1�����w�OӋ����
����1.1��֫�w�\�����Է���
��������݆�ε��\�ӱ�횷������w�\�ӌW�Ļ���Ҏ�ɣ��Ա��C���w��֫���_���\��܉�E�����w��֫���Ź��c�Ϲǡ��߹��γɾ���1 �����ɶȵ����D�P�������Fǰ�۵������\��;��֫�Ĺɹ��cÄ���γɾ���1 �����ɶȵ����D�P�������FС�ȵ������\�ӡ�
�������ڿ���݆�����˵��Ȳ�������Ҫ���p�������Խ�����Ⱥ����ȣ�ʹϥ�P���̓ɂȵļ���õ���Ӻ���չ�����M�Ȳ����߹��ܵĻ֏͡�����݆��ͨ�^��ϵ�y���ӻ��K��̤���\�ӣ��Ķ�����ǰ�ۺ�С�ȵ������\�ӣ����F���w��֫����֫�����ͼ���Ŀ���呟���
����1.2���\��ԭ��
��������݆�β��Ã���֫�w�\�әC�����քe�������w��Ⱥ��҂�֫�w���\�ӣ��Ա��C����֫�\�ӵąf�{�ԡ���֫�\�әC�����ӷ����ϵĻ��K���ӻ�[�ӣ����Fǰ�۵������\��;��֫�\�әC������̤��[�ӣ����FС�ȵ������\��;���������C��������θ߶��{��;��܇��݆���Ƅ���ɴ������ܡ��C���\��ԭ����D1 ��ʾ��
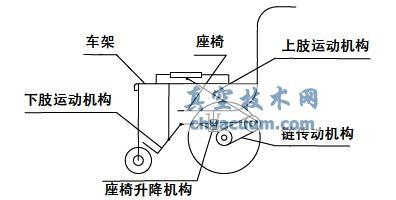
�D1 �C���\��ԭ��ʾ��D
4���Y�Z
�������������B�U�C���Ŀ���݆���OӋ�������w�\�ӌW�Ļ���Ҏ�ɡ�ͨ�^���Cеϵ�y�\�ӷ���������Cе�\�ӷ����OӋҪ���㲿��֮�g�����ڸ�����r���������ٶȺͼ��ٶȷ��ό��H��r�����F�˴����Ϳ���呟����p�����á�