FD-110A�͜u݆���ӱÿ���������ͨ�ŵČ�(sh��)�F(xi��n)�c��(y��ng)��
�������Ļ��ڴ���ͨӍ��ԭ��������DF-110A�͜u݆���ӱÿ�������ģ�ͣ���B��ʹ��CSerialPort�(l��i)��(sh��)�F(xi��n)����ͨӍ�IJ��E��������ӑՓ��Ӌ(j��)��C(j��)�c��Ƭ�C(j��)�M(j��n)��ͨӍ�ąf(xi��)�h������VC++6.0�Ļ��A(ch��)���\(y��n)�öྀ�̴��ھ��̹���CSerialPort�(l��i)��(sh��)�F(xi��n)PC�C(j��)�c��Ƭ�C(j��)֮�g�Ĵ���ͨӍ���̡�ͨ�^(gu��)�f(xi��)�h��׃�r(sh��)��ģ������С���ľ��܉�ܷ������ֲ����ͬ�đ�(y��ng)��ϵ�y(t��ng)�У����кܺõĔU(ku��)չ�ԡ�ͬ�r(sh��)��ģ�������öྀ�̼��g(sh��)�O(sh��)Ӌ(j��)��һ��(g��)���ڱO(ji��n)ҕ�ľ��̣��܌�(sh��)�r(sh��)�ıO(ji��n)ҕ���ڠ�B(t��i)�͔�(sh��)��(j��)����˾��кܺõČ�(sh��)�r(sh��)�ԡ�
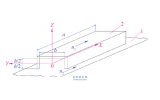
�����ڬF(xi��n)�����I(y��)�����У�����ͨ�ŵđ�(y��ng)��Խ��(l��i)Խ�V������Ƭ�C(j��)��PC�C(j��)֮�g�Ĵ���ͨ�����M(j��n)�Д�(sh��)��(j��)���Q�r(sh��)��(j��ng)����ʹ�á��ڴ���ͨ�ŕr(sh��)��Ҫ��ͨ���p��������һ��(g��)��(bi��o)��(zh��n)�ӿڣ�RS-232C�ӿ��dž�Ƭ�C(j��)��PC�C(j��)�M(j��n)��ͨ����õ�һ�N�ӿڡ���Ƭ�C(j��)�cPC�C(j��)�M(j��n)�д���ͨ���(ji��n)�ε������Ʒ��������Ք�(sh��)��(j��)��_(RxD)�c�l(f��)�͔�(sh��)��(j��)��_(TxD)���B���˴˽��棬��̖(h��o)��(GND)��(du��)��(y��ng)��ӣ���D1��ʾ��
�������ˌ�(sh��)�F(xi��n)��Ƭ�C(j��)��PC�C(j��)֮�g�Ĵ���ͨ�ţ�����VC++6.0��(l��i)��(sh��)�F(xi��n)���̣�VC++6.0��һ�N����(qi��ng)�������?q��)����Windows�����_(k��i)�l(f��)ƽ�_(t��i)���c��
������DOS�´���ͨ�Ų�ͬ��Windows���ᳫ��(y��ng)�ó���ֱ�ӿ���Ӳ��������ͨ�^(gu��)Windowsϵ�y(t��ng)�ṩ���O(sh��)���(q��)��(d��ng)�����(l��i)�M(j��n)�Д�(sh��)��(j��)���f��������Win32���������ļ���(l��i)̎���ģ�������ֱ�ӌ�(du��)�˿��M(j��n)�в��������IJ��öྀ�̴��ھ��̹���CSerialPort�(l��i)��(l��i)��(sh��)�F(xi��n)PC�C(j��)�c��Ƭ�C(j��)֮�g��ͨӍ��
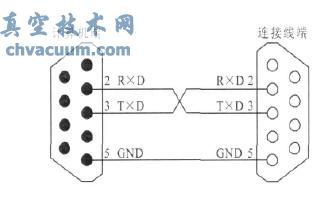
�D1 RS-232�˽ӿ�
1��ʹ��CSerialPort�(l��i)��(sh��)�F(xi��n)����ͨ��
����CSerialPort�(l��i)����RemonSpekreijse�ṩ�Ĵ����(l��i)��ԓ�(l��i)֧�־��B��(��MODEM)�Ĵ��ھ��̲�����
����CSerialPort�(l��i)�ǻ��ڶྀ�̵ģ��乤���������£������O(sh��)�úô��څ���(sh��)�����_(k��i)�����ڱO(ji��n)�y(c��)�������̣����ڱO(ji��n)�y(c��)�������̱O(ji��n)�y(c��)�����ڽ��յ��Ĕ�(sh��)��(j��)���������¼������������¼���;������Ϣ��ʽ֪ͨ�������l(f��)��Ϣ̎������(sh��)��(l��i)�M(j��n)�Д�(sh��)��(j��)̎�����@�nj�(du��)���Ք�(sh��)��(j��)���Ե�;�l(f��)�͔�(sh��)��(j��)��ֱ���ڰl(f��)�͡����w��(sh��)�F(xi��n)���£�
����1.1�������(l��i)�ļ�(SerialPort.h��SerialPort.cpp)�����x�(l��i)��(du��)��m_SerialPort,(��Ҫ��������(g��)���ڣ��tҪ��ÿ��(g��)���ھ����xһ��(g��)�(l��i)��(du��)��)��
����1.2�����ڵij�ʼ��
�������ڵij�ʼ�����aһ����OnInitDialog()����(sh��)�Ќ�(sh��)�F(xi��n)������o������Ҫ���a�Լ����x��һ��(g��)����׃��m_bSerialPortOpened�Á�(l��i)��(bi��o)־�����Ƿ���_(k��i)��
����if(m_SerialPort.InitPort(this,nPort,4800,'D',8,1,EV_RXFLAG|EV_RXCHAR,512))
����{m_SerialPort.StartMonitoring();//����(d��ng)�O(ji��n)�y(c��)�o������
����m_bSerialPortOpened=TRUE;
����}
����else
����{AfxMessageBox("�](m��i)�аl(f��)�F(xi��n)�˴��ڻ�ռ��");
����m_bSerialPortOpened=FALSE;
����}
����1.3�����Ք�(sh��)��(j��)
��������̎���ڴ����¼���Ϣ̎������(sh��)OnComm()�Ќ�(sh��)�F(xi��n)���������յ����ַ��@ʾ�ڽ��վ����У�������a�У����x�˽��Ք�(sh��)��(j��)׃��m_ReceiveData,WPARAM��LPARAM�(l��i)���Ƕ��B(t��i)��(sh��)��(j��)�(l��i)��(polymorphicdatatype),����(j��)��Ҫ�Ԅ�(d��ng)�m��(y��ng)��ÿ��(d��ng)���ڽ��վ��_�^(q��)��(n��i)��һ��(g��)�ַ��r(sh��)���͕�(hu��)�a(ch��n)��һ��(g��)WM_COMM_RXCHAR��Ϣ���|�l(f��)OnComm()����(sh��)���@�r(sh��)���D(zhu��n)������(sh��)���M(j��n)�Д�(sh��)��(j��)̎����
����LONGCFD110ADlg::OnComm(WPARAMch,
����LPARAMport)
����{m_ReceiveData+=ch;
����UpdateData(FALSE);//�����յ����ַ��@ʾ�ڽ��վ�����
����return0;
����}
����1.4����(sh��)��(j��)�l(f��)��
����if(!m_bSerialPortOpened)return;//�z�鴮���Ƿ���_(k��i)
����UpdateData(TRUE);//�x�뾎���еĔ�(sh��)��(j��)
����m_SerialPort.WriteToPort((LPCTSTR)m_strSend-Data);//�l(f��)�͔�(sh��)��(j��)
2��PC�C(j��)�c��Ƭ�C(j��)֮�g���ͨ��
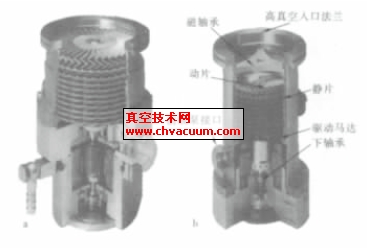
����FD-110A�ͷ��ӱÿ������ǹ����ٟo(w��)ˢֱ��늄�(d��ng)�C(j��)����ӓQ��������ʹ��51ϵ�І�Ƭ�C(j��)
�������������������4λLED��(sh��)�a���@ʾ�l�ʡ�늉������ֵ;3ֻ�I�P(p��n)���چ���(d��ng)��ֹͣ���ƣ��l�ʡ�늉�������@ʾ�ГQ���ߡ����D(zhu��n)���O(sh��)��;�^(gu��)�����^(gu��)�ᡢ���r(sh��)�Ᵽ�o(h��)��(b��o)��;���ؾ��غ��h(yu��n)��RS232ͨӍ���ơ�
����2.1��C51��Ƭ�C(j��)���пڅf(xi��)�h
����(1)ͨӍ������4800bit/S,��ʽ8.1.1
����(2)�����ʽ��

�����L(zh��ng)�ȣ�����(sh��)���L(zh��ng)�ȡ��o(w��)����(sh��)�r(sh��)���㡣
��������Ч�(y��n)��������a�_(k��i)ʼ��
����2.2��PC�C(j��)�c��Ƭ�C(j��)��ͨ��PC�C(j��)�l(f��)���������
����AB800080���ӱ�ֹͣ����
����AB810081���ӱÆ���(d��ng)����
����AB820082�O(sh��)��430Hz
����AB830083�O(sh��)��704Hz
����AB840084Ҫ������B(t��i)
������������“AB800080”�������
����AB�����^-ͬ���a
����80��������
����00������(sh��)�L(zh��ng)�ȣ��o(w��)����(sh��)�r(sh��)����
����80�������(y��n)�a
����2.3����Ƭ�C(j��)�ς���(sh��)��(j��)
������(d��ng)����(d��ng)���ӱÕr(sh��)���S�����ӱ����D(zhu��n)�ٶȵ����ӣ�4λLED��(sh��)�a�@ʾ��(sh��)���S֮���ӣ���(d��ng)�@ʾ��(w��n)����704Hz±10����ӱü����ꮅ���M(j��n)��������D(zhu��n)��B(t��i)���˕r(sh��)���Ƭ�C(j��)�l(f��)�������Ƭ�C(j��)���ɷ��خ�(d��ng)ǰ��(sh��)��(j��)���Ϳ��ԫ@�÷��ӱõĮ�(d��ng)ǰ������B(t��i)��
�������w�f(shu��)�����£�
����(1)����

����(2)�����(sh��)

����(3)��B(t��i)�ֹ�(ji��)

����ע�⣺����1�r(sh��)����Ч��
����2.4����(sh��)�F(xi��n)�ij�����a
����//���N�����(sh��)
����constCStringSTARTMOTOR=“AB810081”
����constCStringCLOSEMOTOR=“AB800080”
����constCStringSET430Hz=“AB820082”
����constCStringSET704Hz=“AB830083”
����constCStringWORKSTATUS=“AB840084”
����constCStringBACKDATA=“AB91078491”
����//��(d��ng)ǰ�\(y��n)��(d��ng)��B(t��i)
����constintStartMotor=0;
����constintCloseMotor=1;
����constintSet430HZ=2;
����constintSet704HZ=3;
����constintWorkStatus=4;
����//����(d��ng)���ӱ�
����CStringstr;//�R�r(sh��)׃��
����str=m_strSendData;
����m_strSendData=STARTMOTOR;
����StrtoHex(m_strSendData);
����CountDisplay(m_strSendData);
����m_strSendData=str;
����CurrentControlStatus(0);
����……………
����//�P(gu��n)�]���ӱ�
����CStringstr;//�R�r(sh��)׃��
����str=m_strSendData;
����m_strSendData=CLOSEMOTOR;
����StrtoHex(m_strSendData);
����CountDisplay(m_strSendData);
����m_strSendData=str;
����CurrentControlStatus(1);
����…………
����//�����@ʾ���ӱî�(d��ng)ǰ������B(t��i)
����CStringstr;
����CStringstrTemp;
����switch(ControlStatus)
����{
����……………
����case1:
����str="���ӱ����P(gu��n)�]";
����strTemp.Format("��(d��ng)ǰ������B(t��i):%s",str);
����m_ctrlControlStatus.SetWindowText(strTemp);
����//�@ʾ��(d��ng)ǰ������B(t��i)
����break;
����……………
����UpdateData(FALSE);
����}
3���Y(ji��)Փ
����������PC�C(j��)�c��Ƭ�C(j��)֮�g�Ĵ���ͨӍ��(sh��)���У�����ֱ��ȥ����(xi��)��Ƭ�C(j��)(��λ�C(j��))������ֱ������ͨ�Ņf(xi��)�h����(xi��)PC�C(j��)(��λ�C(j��))���\(y��n)�е�����ܛ�����Ķ���(sh��)�F(xi��n)�c��Ƭ�C(j��)֮�g�Ĵ���ͨӍ��ԓ�����Ѓɴ�(y��u)�c(di��n)����ͬһ�όӿ͑���ܛ�������c��ͬ�Ć�Ƭ�C(j��)֮�g��(sh��)�F(xi��n)����ͨӍ���Ķ���(sh��)�F(xi��n)��(du��)��Ƭ�C(j��)�Ŀտ��ơ�����������΄�(w��)�e�࣬���Ñ�Ҳ����ͨ�^(gu��)��λ�C(j��)�\(y��n)�е�����ܛ����(l��i)��(du��)ͬһ��Ƭ�C(j��)��ͬ�֓�(d��n)���ԵĿ����΄�(w��)��