����ARM+FPGA����Ճ��ɿ���ϵ�y�OӋ
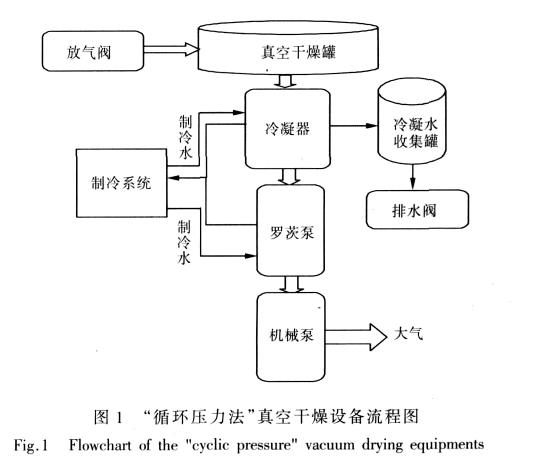
����������\�g��1980������҇��d���ԁ���ȡ���L��lչ�����яV��������ʳƷ���͜غ�����ȿƌW�I����һЩʳƷ��ˎƷ�ӹ��ИI�Ĺ�ˇ��Ҫ���������������g��ҪѸ�ّ����c�ƏV������ϵ�y�����ϵļӹ��^�̺��|��Ӱ푱��^��߀�Q���������������b���\�е��Ԅӻ��̶ȡ�����������һЩ�Ќ����ďS�Ҍ����əC����ϵ�y���о������^����Mչ��������PLC���|�������b�ã��܉��L�ƃ����^�̵Ĺ�ˇ�������^��ظ����˃��əC�����ܡ�
�����S���Ƽ��İlչ�������|������PLC����ϵ�y�����F���ܔUչ���������y���������治���S����ԭ���ѽ�������ȫ�M����I����Ҫ���Ј���Ҫ�_�l���������M�ă����O�����ϵ�y��2007��1���Ϻ��h�|��ˎ�Cе���S�_�l�����Ŀǰ���������M��Ƕ��ʽ���ɿ���ϵ�y��
��������ϵ�y�������ɼ��g�����əC����ϵ�y����Ҫ����OӋ�����ø����ܵ�Xscale�Ⱥ�Ƕ��ʽ̎�������Y��FPGA��ɼ�ɢ����(DCS)��ԓϵ�y�з����ɿ��Ĺ������ܡ�����ĔUչ���ܡ����ƵĽ��棬�Ķ����и����ĸ�������
1��ϵ�yӲ���Y���OӋ
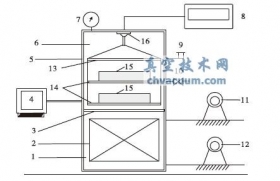
����ԓ����ϵ�y��Ҫ��Ƕ��ʽ�������ͬF���ɾ����T���(FPGA)�������ض��{��ģ�K����ն��{��ģ�K��GSMģ�K�����غ;W�jPC��LCD���ơ����N����������ӡ�C���z�y������ģ�K�M�ɣ���D1��ʾ��
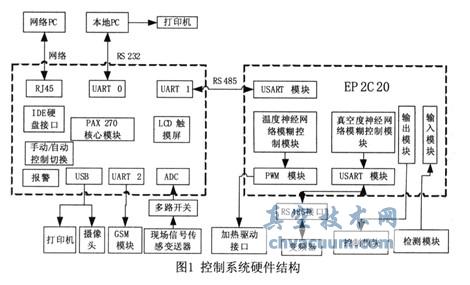
��������ϵ�y�ĺ�����ARM��FPGA�����M�ɣ����F����ϵ�y��ͨ�š��F���@ʾ���F�����Ƶȹ��ܣ�ͬ�r���F�ضȡ���նȵ��W�j���ơ�
�����z�y��ģ�K��Ҫ�ɂ���������̖�{�����ɼ��ȽM�ɣ����F�ضȡ���նȡ�����Լ�����Ҫ����(���^������������|��λ�õ�)�Ġ�B�Ĝy��������ģ�K��Ҫ�ɹ���x���Ӽ����ЙC���M�ɣ����F���y��ˮ�y��늄әC��׃�l�����ӟ����ȵ����c���ơ�LCD�|������IDEӲ�P����ӡ�C�f�{�����Ԍ��F���ɹ�ˇ�����Č��r�ɼ����@ʾ��ݔ���c�����惦��߀�Ѓ��əC�ض��c��նȅ������O���c���Ƶȹ��ܡ�
����GSMģ�K���F���I�F���ğo���O�y������PC�������h�̿��ƣ��W�jPC�ɔUչ�������d��ľW�j���ơ�Ƕ��ʽ̎�������x������ԓ��ո���ϵ�yҪ�M�д����Ĕ����\�㣬��Ҫ�^���Ŀ�����������Ҫ���^���USART�ӿڣ�ͬ�rҪ��ADC�D�Q���ܡ�LCD�|������USB�ڵȣ���̎�����x���ϣ���ͨ��8λ��16λ��Ƭ�C���y�Ԅ��Σ����32λ��Ƕ��ʽ̎�����DZ��^�õ��x��ϵ�y�x��INTEL PAX270����һ�����32λXscale���ĵĸ����ܡ����I����32λRISC�������������ИO�͵Ĺ��ģ�LCD������(���֧��64KɫSTN��1256KɫTFT)�ṩ1ͨ��LCD����DMA��8ͨ��10����ADC���|�����ӿڣ�3ͨ��UART(IrDA1.0��16�ֹ�TxFIFO����16�ֹ�RX FIFO)/2ͨ��SPI��2�˿�USB���C/1�˿�USB�O��(1.1��)��PWMͨ��(4·ݔ��)���Լ����_119���Д�Դ���@���������e�m���Ԅӻ����ã����m���ڹ��I���ơ��t��ϵ�y���L�����ƺ��ϾS�o�ȑ����I��
����FPGA�������x������ԓϵ�y�������W�j�Č��F����Ҫ����RAM���g���������g�����Ͳ��Ӌ�㣬ͬ�r߀��Ҫ������ͨ��I/O�ӿڣ�����ݔ��ݔ��ģ�K�Լ�����푑����_��PWM�{�ƹ��ܣ������FPGA�DZ��^�õ��x���@���x��Altera��˾�Ƴ��ĵͳɱ�Cycloneϵ�У���̖��EP2C20��EP2C20�Ȳ���18752i߉��Ԫ��52��M4K RAM�K����Ӌ239KλRAM��26��Ƕ��ʽ18*18�˷�����4���i��h���YԴ�dz��S�����ɝM��ϵ�y�OӋҪ��
2���ض��c��նȿ���ģ��
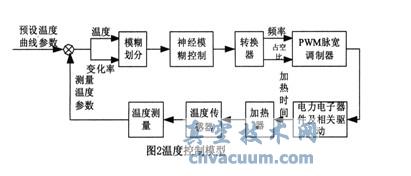
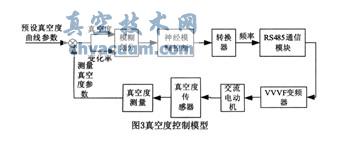
2.1����ػ�ij�A���ض������Ŀ���ģ��
�����ضȿ���ģ����D2��ʾ���ضȿ��Ʋ����W�jģ������ģ�ͣ��O��ֵ�͜y��ֵ���^ģ�����ֺ�ͬ�r������ģ�����ƾW�j������ģ�������Ӽ���ͨ�^�D�����a����PWM�}���{���õ��l��ֵ�cռ�ձȣ�Ȼ������PWM����̖�����������������Դݔ���o�t��ʯӢ�ܣ���������M�мӟᡣͨ�^�ضȂ��������{���·���γɜض�ֵ�͜ض�׃���ʣ������ض�ֵ�͜ض�׃���ʿ�������ݔ���l�ʺ�ռ�ձ��M���{����
2.2������նȻ�ij�A����������Ŀ���ģ��
������նȵĿ���ģ���c�����ضȿ���ģ�ͽY�����ƣ���ͬ������ģ�����ƾW�j��ݔ������ֱ������늙C�Ŀ����ӣ����ǰ�ݔ�����l�����D�Q��׃�l�����h�̿�����̖��ͨ�^RS485�ӿڿ���׃�l���Ć��ӡ�ֹͣ���l���O�ã���D3��ʾ��
2.3���W�j�x���c����
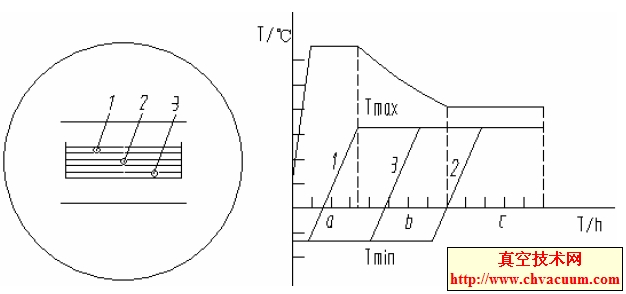
����������������ģ�ͣ����^�����BP�W�j�x��Ŀ����W�j��D4��ʾ����ģ����������ݔ��/ݔ���������x���Լ�ģ��Փ���ģ���Ӽ��Ĵ_�����棬�cһ���ģ���������]��ʲô�^�e��ֻ���������ֶ����������W�j��
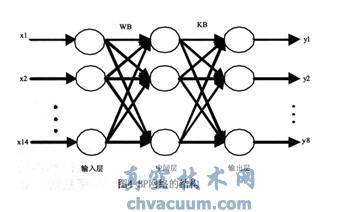
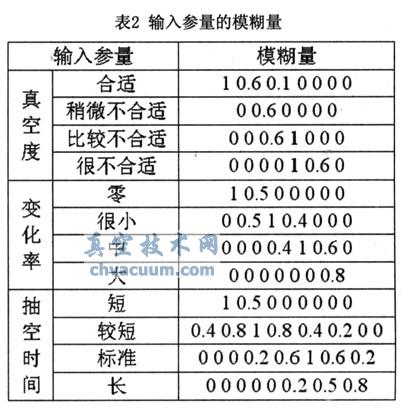
��������նȿ��ƞ�������C����ģ�͵ľ��_�̶ȡ���x1~x7��ݔ����նȵ�ģ���Ӽ���x8~x14��ݔ����ն�׃����ģ���Ӽ���y1~y8��ݔ����������ģ���Ӽ����ı�1���Կ���������16�l����Ҏ�t�����磬����նȞ�"���m"��׃���ʞ�"��"�r����Օr�g��ԓ��"��"���@���ӱ����Ա�ʾ�飺
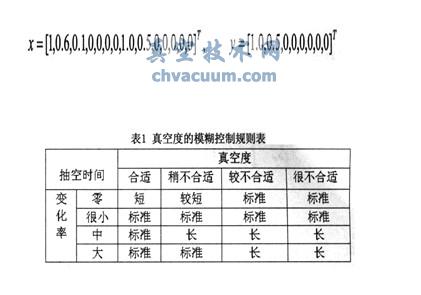
�������У�x�еĸ�Ԫ�؞錦�����`�ٺ�������ģ���Լ����xֵ��ͬ���ɵ�����15���ӱ��������������������W�jӖ������Ӗ���Y�����W�j�ѽ�ӛ����ģ������Ҏ�t��ʹ�Õr������ӛ�����ܡ���D��2��ʾ����ÿһ��ݔ�녢����ģ������
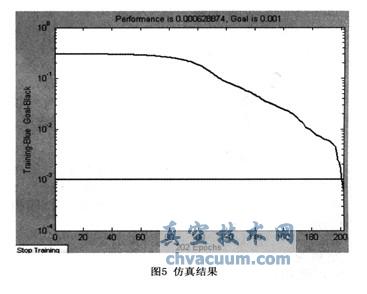
��������ģ��Ҏ�t���ɵõ��W�j��Ӗ���ӱ�������Ӗ�����OĿ���`���0.001��Ӗ��������1000�Σ�����Y����D5��ʾ�����Կ�������Ӗ����202�κ�Ŀ���`���_��Ҫ��
3�����Y
������ϵ�y������ARM�cFPGA���p��̎�������c�F�ڳ��õ�PLC������ȣ���������ϵ�y���ܼ��\���ٶȣ�����FPGA�Ŀ��ؘ�Ӌ�㼼�g���Ɍ��F�ӑBϵ�y�ĸ����c���������h��ϵ�y�ĸ����c�S�o��