��չܵ��иߜس���(d��o)�őҸ�܇�\(y��n)�Еr������ܺ�����
������(d��ng)��չܵ��еĚ≺����һ��ֵ�r�������\(y��n)�еĸߜس���(d��o)�Ÿ�܇���ܵ��Ŀ՚���������ʡ�ԡ���ô�Ÿ�܇���\(y��n)�ӷ����ϵĄ��ܕ�����܉�����н��^������ԭ��?q��)���܉���ϱ���ň��ķֲ���ƽ����D(zhu��n)�Ƶ��c�\(y��n)�д�ֱ�����ϵ���Ӷ��p�ĵ�����һ�����O(sh��)Ӌ�õ�܉������ȱ���Dz��ɱ���ģ�����ӑՓ�Ÿ�܇���@�N܉���ϵĄ��ܓp���c�Ÿ�܇�\(y��n)���ٶȵ��P(gu��n)ϵ����һ����խh(hu��n)�����\(y��n)�����ĸߜس���(d��o)�Ÿ�܇���@�N��ӽ��ƞ鏗�ɵ�������ӣ�Ȼ�����(j��)�ߜس���(d��o)�w�����Լ�����(y��ng)�y��ֵ���_���䄂��ϵ��(sh��)�c����ϵ��(sh��)���Ķ����]��������ӵĄ��ܓp����r��ģ�M�����N��Ӯa(ch��n)����ʽ�ĺ�����r���c��(sh��)�Y(ji��)������ϣ��������ܺ�Ҏ(gu��)�ɼ�������չܵ��\(y��n)ݔ�O(sh��)Ӌ�c��(y��ng)���еą����rֵ��
����݆܉��܇����c�����ϵ�܉���н��|���a(ch��n)���c܇�w�|(zh��)�����P(gu��n)��Ħ������ʹ܇�w�IJ��ք����D(zhu��n)׃?y��u)���ܓp�ĵ���݆܉��܇�oՓ���Ҳ�����ܱ����@�NĦ���������őҸ����g(sh��)ʹ��܇�w�Ҹ���܉���ϣ��]�����c܉����Ħ�����@�N���|�p����һ�����x�Ͽ����f���ܱ���ġ���չܵ��őҸ����Ҹ����g(sh��)�c��ռ��g(sh��)�Y(ji��)������ͬ�r�˷���݆܉��Ħ�����c�՚���������խh(hu��n)������䃞(y��u)�c(di��n)���ڸ��и��I(y��)�õ���(y��ng)�ã���̫��ܑ�(y��ng)�á�늻��W(xu��)��ˇ�ȣ�����չܵ���ͨ���\(y��n)��������խh(hu��n)���՚��ܶ�С����Ħ������С�����ԡ�
������Փ���f����(d��ng)��չܵ����_(d��)���^������Օr���������\(y��n)�е����w�͛]���˿՚�������Ȼ��Ҫ�_(d��)���@���l���Dz��F(xi��n)��(sh��)�ģ�δ������չܵ������ں���ն����\(y��n)�������룬�@��Ҫ�������Փ����(j��)�c��(sh��)(sh��)��(j��)���_�������ǣ����о��ˆT���@��������һ�����о���
�����ߜس���(d��o)�őҸ����g(sh��)�ǴőҸ����g(sh��)�е�һ�N�����䪚(d��)�صă�(y��u)�c(di��n)���ܵ�Խ��Խ�����ҕ���ߜس���(d��o)�K������܉���ψ��������ͨ������ö��Ҹ�������܉�����Ϸ����������܉������܉������Ĵň��ֲ��Ǻ㶨��Ԓ���o�����ش�܉����ij��ٶȺ�Ÿ�܇������(w��n)����������܉�\(y��n)�ж��]����ӡ������������܉��������������ȫ������܉������Ĵň��ֲ��Ǻ㶨�ġ���(d��ng)����(d��o)�K�\(y��n)�е��ň���ƽ�ĵط��r���͕��a(ch��n)��һ������ӣ���ô�\(y��n)�ӷ����ϵĄ��ܾ͕�һ�����D(zhu��n)�����c�\(y��n)�з����ϴ�ֱ����Ӷ��p�ĵ������ĵ�Ŀ�ľ����о�܉�����@�N��ƽ���c���ܓp�ĵ��P(gu��n)ϵ�����O(sh��)Ӌ�Ÿ�ϵ�y(t��ng)���(q��)�Ӽ�����ϵ�y(t��ng)�ṩ���g(sh��)����(sh��)������(sh��)�����(q��)��늙C(j��)�Ĺ��ʴ�С���(q��)������С������ٶȺ��x��ʲô���Ʋ��Եȡ����˺����о����Ҹ������ƞ鏗����(܇�w�����c܉���ϱ����д���һ�՚⏗��)���ƌ�(d��o)�������Ĕ�(sh��)�W(xu��)ģ�ͣ�������A(ch��)��ӑՓ����ܠ�r����������Ͻ�ͨ��W(xu��)����(d��o)�c����Դ�о��_�l(f��)���������аl(f��)����չܵ��ߜس���(d��o)�őҸ���(sh��)�ϵ�y(t��ng)(�D1)����C��ԓϵ�y(t��ng)�\(y��n)�Эh(hu��n)�������_(d��)��2000Pa����(sh��)��ښ≺��3000Pa�r�M(j��n)�У������ϡ���Ĵ�����\(y��n)���ٶȲ������r�����ܿ՚���������ʡ�ԣ����J(r��n)��ߜس���(d��o)�Ÿ�܇��ϵ�y(t��ng)���\(y��n)�Еr����ܓp��ȫ������܉���Ų�ƽ����������Ӷ��ĵ��ġ�
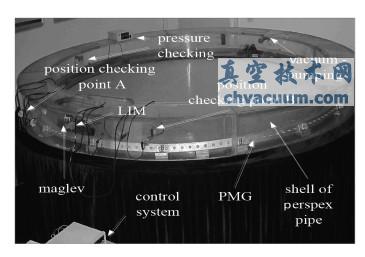
�D1 ��չܵ��ߜس���(d��o)�őҸ���(sh��)�ϵ�y(t��ng)
1��܉��ƴ�ӷ�ʽ�c�Ÿ�܇�Y(ji��)��(g��u)
��������܉����18���ô���^ƴ�ӣ�ÿһ��(ji��)����10С�ؼ����K���F�D�����ɣ�ÿһ�ع�(ji��)��2С�KN30���ϰ�N-N���?sh��)ķ�ʽ�D������K�M�b�����L10m�ĈA������܉�������˷�����Ҋ��������һ���֮�ʾ��D��D2(���ƞ�ֱ܉��)��
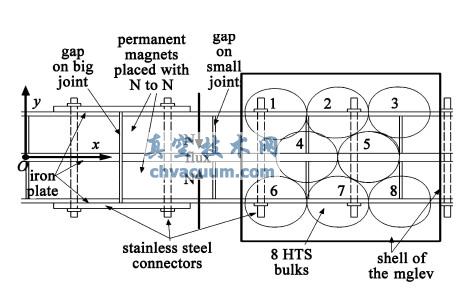
�D2 ����܉��ƴ�ӷ�ʽ���Ÿ�܇�Y(ji��)��(g��u)�D
�����D��x��y�����ј�(bi��o)����z����鴹ֱ����(ָ��܉��)����(d��ng)�o�Ÿ�܇��x�������(q��)�����r���Ÿ�܇ֻ��x������ǰ�\(y��n)�ӡ��Ԉ��䷽ʽ���Ÿ�܇�Ҹ�������܉���Ϻ����܉���Ľ��^��y����]���R�r��܇�w������y����Ĵň��ֲ��eλ���д˷����ϵĔ[�ӣ����˺����ڴ�ʡ���@�N�[�ӡ�
����ԓϵ�y(t��ng)��һ�A��܉��ϵ�y(t��ng)���D1��ʾλ�ü���һ�(q��)��ֱ���Б�(y��ng)늙C(j��)(LIM)���ٶșz�y�b�ã�܇�wÿ�����@�����cÿ��������������(y��ng)���ٶ���á���(d��ng)܇�w�D(zhu��n)������(y��ng)λ�Õr��늙C(j��)���ӽo܇�w���٣�����λ�Þ�܇�w�������\(y��n)�Р�B(t��i)��ÿȦ�o܇�w��һ���٣����r�g�s28s�r���ن���늙C(j��)������ʾ�ٶ��S�r�g׃�������Ǿ���ʾ܇�w��늙C(j��)�@�õĄ��ܣ���Ȧ����ʾ܇�wÿȦ��܉���ϵĺ��ܡ��ɈD��֪��
����(1)��(d��ng)��늙C(j��)�(q��)�ӵĕr���ٶ������ӣ��P(gu��n)��늙C(j��)���ٶ��ڜpС����ʾ܇�w���\(y��n)���^�����\(y��n)�з����ϵĄ����ڜpС�������˿՚�������܇�w�c܉���]�н��|�������ܺ���������𣬌�(sh��)������@�ܿ���܇�w����ӡ�
����(2)�ٶ�Խ����Խ�졣
����(3)��(d��ng)�ٶȼs��318m/s�ĕr��ÿȦ�����c늙C(j��)�ṩ���ܽӽ���ȣ�܇�w�ٶȲ���������늙C(j��)�^�m(x��)�\(y��n)�Еr�ٶȱ��֣��P(gu��n)��늙C(j��)�r���ٶ��½�����鼼�g(sh��)ԭ��ϵ�y(t��ng)Ŀǰ������ٶ�ֻ�s��4m/s����ϵ�y(t��ng)�����P(gu��n)����(sh��)���ֱ���Б�(y��ng)늙C(j��)�ij��������μ��ϵĹ��ʼs��011kW���Ķ��O(sh��)Ӌ����Ҫ����(q��)��늙C(j��)���(q��)��ԓϵ�y(t��ng)��
4���Y(ji��)Փ
������ǰ���������(sh��)�ó����½Y(ji��)Փ��
����(1)�ߜس���(d��o)�őҸ��đҸ�����һ���Ǿ�����������r���Խ��ƞ����Ꮧ�������������c����ϵ��(sh��)�_����һ����(f��)�s���^�̣������Ǿ��ԣ��������еķ���Ӌ��Ҳֻ��һ������(zh��n)�_��ֵ��
����(2)����չܵ��еĴőҸ�ϵ�y(t��ng)�����܉�����IJ���������B�ӹ�ˇ�ֲڣ���ô܇�w���\(y��n)���^���У����\(y��n)�ӷ����ϵĄ��ܾ�����u�D(zhu��n)�����c�\(y��n)�з���ֱ�����ϵ�����ܓp�ĵ���
����(3)܉����ƽ��a(ch��n)������әC(j��)�ƿ��в�ͬ��ģ�M���������ýY(ji��)��������ͬ�����ǟoՓ�ķN����������������һ������ϵ�y(t��ng)���@�c��(sh��)�ĬF(xi��n)���c���y��(sh��)��(j��)�@ʾ�ĽY(ji��)��һ�¡�