����늴��y�_�h(hu��n)-�]�h(hu��n)�ͺϿ����㷨
����������늴��y���о������Կ��ٽ��������������ܵ�ͨ�ÿ����㷨��Ŀ�ˣ��Գ������늴��y��푑����Ԟ�;��������ˌ��_�h(hu��n)���ƺ��]�h(hu��n)������Y�ϵ��_�h(hu��n)-�]�h(hu��n)�ͺϿ����㷨��Փ���˿����㷨��ģ�ͽY�����OӋ�^�̡���ͬ�ڌ��`������Ψһݔ��ij�Ҏ(gu��)�����㷨���ͺϿ����㷨ͬ�r��Ŀ��ֵ���`�������������ݔ�롣��늴��y푑����Ԍ�����A������늴��y�ķ�(w��n)�B(t��i)���Խ����_�h(hu��n)���Ʊ�������ϵ�y�ķ�(w��n)�B(t��i)�Ǿ���;����늴��y��˲�B(t��i)�����OӋ�]�h(hu��n)�������͜��������A������ģ�K������ģ���`��͜������Ե�Ӱ푣���߄ӑB(t��i)푑����ܡ����Y����C�ˏͺϿ����㷨�Ŀ��ƾ��ȡ�푑��ٶȺ������ԡ�
������ʩ�ʡ���ȡ���ˎ���ӡ�׃�������O���ЏV�����ñ���늴��y�������������M�п��ơ����ڱ����y����Ҫ�����^(q��)�g�Ⱦ������õľ��ԣ�����������Ҫ�ߕr�����ú��ε�PID �����㷨���ܻ����M��Ҫ���S�������r�I(y��)�����ƾ��ȡ��ӑB(t��i)���ܡ�ȫ���r�{��(ji��)���ܺͷ�(w��n)���Ե�Ҫ����u��ߣ��t��Ҫ�OӋ���ܸ��Ӄ�(y��u)Խ�Ŀ�������
������߿������ܵĴ�ʩ��Ҫ������(y��u)��늴��y�Y�����M�����㷨�ɂ����档�ڿ����㷨���棬��ռ��g�W(http://smsksx.com/)֮ǰҲ�l(f��)���ĺܶ�������ᘌ����w���È����OӋ�˲�ͬ�Ŀ����㷨����������߿����㷨���ܵ�ͬ�r�����M�����㷨��ģ�K����ͨ�û����������һ�Nᘌ�����늴��y�����㷨���OӋ���̣�����ԓ���̼��ɫ@�þ������ÿ������ܵĿ����㷨����ij�����������y������Փ�������㷨���OӋ�^�̺Ϳ���Ч����
1��늴��y���Ԍ���c��ģ
����1.1��늴��y���Ԍ��
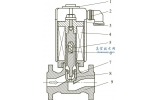
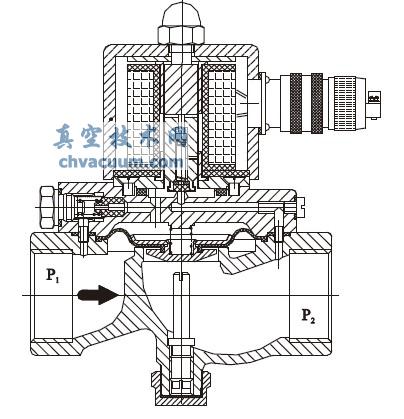
������ij�����������y������ƌ����ͱ��ɰl(f��)�әC�ӣ�ͨ�^�{��(ji��)ռ�ձȿ���Һ���ĉ�����늴��y���Ԍ�������(w��n)�B(t��i)���Ԍ���˲�B(t��i)���Ԍ���(w��n)�B(t��i)������ҪӰ����؞�ռ�ձȺ��ͱ��D�٣������Y����D1a ��ʾ����(w��n)�B(t��i)��������Ҫ���������Ⱦ��Զ����ã��������@������Ժͻ����ԡ�ռ�ձ�һ���r���ͱ��D��Խ�ߣ�����Խ���D�ٳ��^3000r/min�r���䌦������Ӱ��Ѳ����@����������ăɗl�������M��ƽ��������ƽ��̎�����õ�ƽ����(w��n)�B(t��i)�������ԣ���D1b ��ʾ��
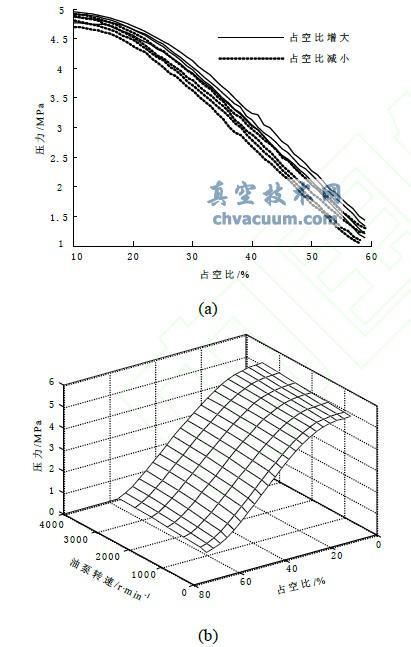
�D1 늴��y��(w��n)�B(t��i)���Ԍ��
(a)���ַ�(w��n)�B(t��i)�������Y�� (b)ƽ����(w��n)�B(t��i)�������ԈD
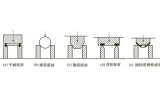
����˲�B(t��i)���Ԍ���ǜyԇ��ͬ�D����ռ�ձ��A�S׃���r�ĉ���푑��^�̣������A�S�������A�S�½��ɂ��^�̣��Y����D2 ��ʾ�����Կ�����˲�B(t��i)����׃���^����3 �����c��
�����ى�����푑����t�r�g�s��0.03s�������c�D�ٟo�P��
������푑��^���д��ډ������ӣ��ɽ��ƞ���Aϵ�y��
�����۲�ͬ�D���µĉ��������^�����в�e���D��Խ�ߣ�푑��ٶ�Խ�죬����ͬ�D���µĉ����½��^�̄t�����غϡ�
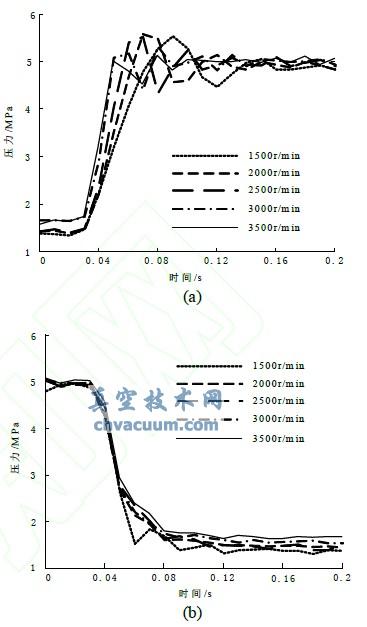
�D2 늴��y˲�B(t��i)���Ԍ��
(a)�A�S���� (b)�A�S�½�
4���YՓ
����(1) ������늴��y�ķ�(w��n)�B(t��i)��˲�B(t��i)푑������M�Ќ���늴��y��푑����Է֞鷀(w��n)�B(t��i)����ԡ����A�ӑB(t��i)푑����Ժ͜������ԣ�����늴��y�ĺ������f����ģ�͡�
����(2) �Y����Ŀ��ֵ��ݔ����_�h(hu��n)���ƺ����`���ݔ����]�h(hu��n)���ƣ��γ��_�h(hu��n)-�]�h(hu��n)�ͺϿ��ƣ��ɸ���Ч������ϵ�y��Ϣ��������(w��n)�B(t��i)���Խ����_�h(hu��n)���Ʊ����]�h(hu��n)�����������`������������Ŀ���M����������ͬ�����`������Ψһݔ��ij�Ҏ(gu��)���Ʒ������ͺϿ���ͬ�r��Ŀ��ֵ���`�������������ݔ�롣
����(3) ���ͺϿ����㷨������늴��y�������ƣ�����늴��y��3 �����Էքe�OӋ���_�h(hu��n)���Ʊ����]�h(hu��n)�������͜��������A������ģ�K���ƶ��˿����㷨���OӋ���̡����͑��ýY����C���_�h(hu��n)-�]�h(hu��n)�ͺϿ����㷨�Ŀ��ƾ��ȡ�푑��ٶȺ������ԡ�