��צ����ձ��D�Ӄ����;��о�
�������Ľ�B����צ����ձ��D�ӵĵ����;��Լ������;��Ę������������ɴ˵õ���9 �N��ͬ��צʽ�;��������ҳ�9 �N�;��е���������������քe���@9 �N��ͬ��צ���D���M�й����^���������Ĕ�ֵģ�M�Լ��D�ӵ������������ڔ�ֵģ�M�У�צ���D�ӹ����������S��צ��돽�����Ӷ��pС���ڑ��������У��S��צ��돽�����ӣ��D�����ܵ�������pС�������W������ߡ���ˣ��C���乤�����ܺ����W���ܿ��]��צʽ��ձ�����x������צ��돽��0.114~0.143 ��צ���D�ӡ�
����צʽ��ձ�(����צʽ��ձá�צʽ���s�C��צʽ��Û�C��)��һ�N���͵��ݷeʽ���w����ݔ�͙Cе�����Ƀɂ������צ���D���Լ��C�����ܷ��b�õȽM�ɡ�צʽ��ձ������r���Ƀɂ��D���M��ͬ��������D�\�Ӷ�����ǻ�M�Љ��s������Û���Ķ��_�����w����ݔ��Ŀ�ġ�
����צʽ��ձþ��Пo�蝙������ʽ�o�ͣ��\�Dƽ�������c����;�V�����;��ă�����Ȼ�������ܵ���ߡ�צʽ��ձ��ѽ��V�����õ�ʯ�ͻ����ИI���tˎ�ИI�Ͱ댧�w�ИI��;צʽ���s�C����͉����s�CҲ���Դ��滯���S�еĵ͉����s�C����ˣ�צʽ��ձÑ���ǰ�����кܴ�ĝ�����
������醇������īI�l�F�����;����棬����W��ͨ�^�о��ݗU�;���������צʽ�D���;������ȌW�ߘ����˲�ͬ���A�돽��픈A�돽��צʽ�;����U����צʽ�;���͡�ͬ�r��Ҳ��צʽ��ձõĹ����^���M���˼��µ��о����ڔ�ֵģ�M���棬�ѽ���צʽ��ձõ�ģ�M�о������^�����ķ��������ɹ�ģ�M��צʽ��ձõĹ����^�̡�
������ˣ����Č���צ�͵ĵ���צʽ�D���;��Լ��������;��M���о���ͨ�^�������������M�Д�ֵģ�M�Լ����D�ӵ���������������9 �N�;��Ĕ�ֵģ�M�Y���M�Ќ��ȣ��ó���ѵă����;�ȡֵ����������aƷ�OӋ�ṩ��Փ������
1����צ����ձ��D���;�����
����1.1�������;�����
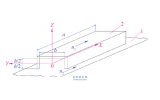
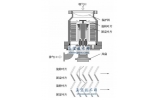
���������;�������D1 ��ʾ���҂��������Q�������צ�;�����r0 �;����;��������^�����£����Ȍ��AO1 �̶����AO2 �������c�AO1���x��L������ӛ䛈AO2 ��a �c��λ�á����AO2 �Խ��ٶ�ω �@�AO1 형r��M���D�ӣ�ͬ�r���AO2 Ҳ�Խ��ٶ�ω �@����A��형r��D�ӡ�a�c�Ƅӵ�܉�E���阋��צ���D������Ҫ��������a �c�Ƅӵ�܉�E�����Ĺ�ʽ������ʾ��
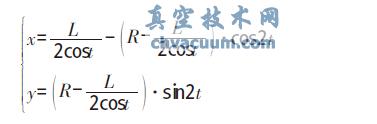
����ͨ�^�����L�ƹ��ߣ����Եõ�a �c�Ƅӵ�܉�E������Ȼ��ԓ�����M��һϵ�е����D׃�Q������3 ����ͬ�돽�ĈA�M�н�ȡ�����ɵõ����͵�צʽ�D���;�����צʽ�;��Ĺ��A�돽��35 mm��צ픈A���돽��50 mm����D2 ��ʾ��
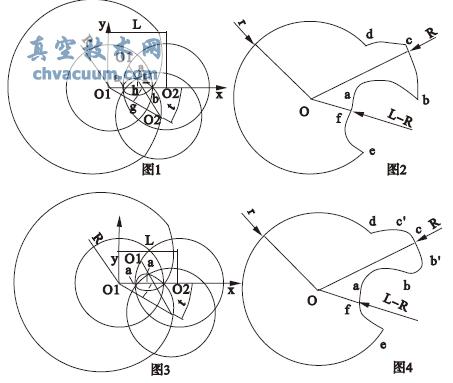
�D1 �����;��������D2 ����צʽ�D��
�D3 �����;��������D4 ����צʽ�D��
4���YՓ
����(1)���Ľ�B�˵���צʽ��ձ��D���Լ������D�ӵĘ������������Ҷ��x�ˏ�r0 ��r8 ��9 �N��ͬצ��돽��צʽ�D�ӡ�
����(2)�Ĕ�ֵģ�M�Y��������צʽ��ձù����r�ĉ������S��צ��돽����������ͣ�������r0 ��r5 ֮�g������˥�p���^������
����(3)��צ���D�ӵ����������У���֪�D��צ�۵�1��2 ��λ�����a��������׃�Σ������S��צ��돽�����ӣ������������Խ��ԽС����������Խ��Խ�á���צ��돽4 �Ժ������ֵ˥�p��������������څ��ƽ����
����(4)ͨ�^���Ϸ����������������Լ��O���d���xȡ���m��צ���D�ӣ�צʽ��ձ�ͨ��ȡ����צ��돽��0.114~0.143 ��צ���D�ӡ�