����Ӌ������wϵ�y�����W���p�����y��ձ����ƽ���о�
�����p�����y��ձ��C���\�ӏ��s���\��Ӌ������wϵ�y�����W�����M�з���Ӌ�㣬���ԫ@�Ï��s�������̵ľ��_�⡣��������Ӌ������wϵ�y�����W�����˻��y�õ����ƽ�⣬�ƌ������PӋ�㹫ʽ���C����Ӱ����ƽ��Ķ�����Ӳ��������p�����y��(�p�Y��)�Ĕ��Wģ�ͣ�Ӌ����ԓ��ƽ��ǰ���֧�����������λ�Ʒ�ֵ���Y��������Ӌ��Y���c���yԇ�Y����ȫ�Ǻϣ��`����Ժ��ԡ��Y��Ҳ�f��Ӌ����wϵ�y�����W�����ǿɿ���Ӌ�㷽����ͨ�^���p�����y��ձõ��\�Ӻ̈́����������Եõ��������Ą����W푑������а����p�����y��ձõ����λ�Ʒ�ֵ����ֱ�ӷ�ӳ���p�����y�õ���ӬF���ɴ��M�Є�ƽ��Ӌ�㣬�Ķ��_��������ӵ�Ŀ�ġ�
�����p�����y��ձÄ�ƽ��Y���ЃɷN��ʽ���ɸY�������Y�������Y���Ļ��y��ձõ�ƽ��t���������Y�������������������Ҳ��������ȫ������ƽ���������ҽY���̶����º��y���M�Ѓ���������ӣ����p�Y����ƽ��һ��������ƽ��݆�Լ��ڃȲ��������؉K���Խ�Q���μ����yʽ��ձ��\�Ӡ�r�ѽ��^����s�������p�����y��ձõ��\��ƽ���о����轨�����_���Wģ�ͣ�ͨ�^ģ�Ͷ����о����y�ø��\�Ӳ����Ą����W푑��Լ��䌦���w�ļ������ã��_���p�����Ŀ�ġ����y�Ļ��y��ձõ���������������õ�����Փ���W���P��Փ�����Ի��y����Ҫ������λ�á��ٶȺͼ��ٶȵ����Pϵ�Լ�ʸ���ϳ�ԭ�����A�M�з����ġ������^���ε�ϵ�y���ֹ��ƌ���ɵõ��^���ε��ַ��̽M��Ȼ���������p�����y�ã������ǃɸY�������Y�����Լ������п��ܳ��F�Ķ�Y����Ҫ�������ӏ��s�Ę����ƌ������W�������ஔ�����y���������׳��e��
�������y�D��׃�κ��Բ����]�����y���\��ϵ�y�������ĸ����\���c����������ӵ���ϣ��_�������N�ȬF��ij��F���������Ӌ����wϵ�y�����W����p�����y�õď��s�C���Ĕ��Wģ�ͣ��M�����PӋ�㹫ʽ���ƌ��Եõ��p�����y��ձõ��\�ӌWҎ�ɺ̈́����W푑��������M�Є�ƽ���Ӌ������Խ�����ӡ�
1�����y�ö����wϵ�y�\�ӷ���
����Ӌ������wϵ�y�����W�е��\�ӌW��������ϵ�y���B�����w�c���w���\�Ӹ�����l�c�������c�\�Ӹ������ļs�������M��λ�á��ٶȺͼ��ٶȵķ�����
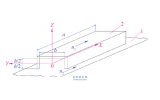
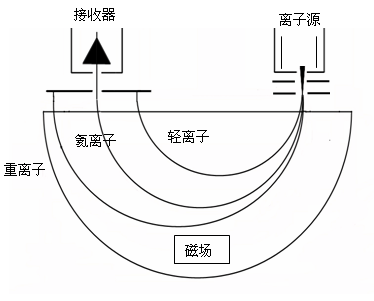
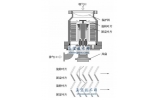
�������y�ÿɺ�������D1�������u�K�C�����C����2�����Ԙ����M�ɣ����wB1��ƫ��݆�����wB2�黬�y���μ����y��ϵ�y�V�x���˂�����n=3×2=6��
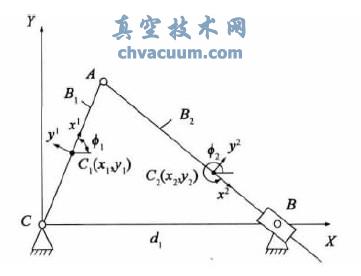
�D1 ���y�ú����C���\�ӈD
���������ϔ������Կ�����
����(1)ƽ����y��֧��������ֵ���ֵ��11948N������4815N�������˼s����֮����ƽ��Ч���@����
����(2)ƽ��ǰ���y�õ����λ�Ʒ����^��x��y��z������������λ�����ֵ��4.2mm����СֵҲ��1.2mm����ƽ���λ��ֵ������ͣ�x��y��z������������λ��ƽ��ֵ������1mm�����ȣ�y��z��������ֵ�H��0.37mm��x��������λ��ƫ����Ҳֻ��1.1mm���Ǻ�����ĽY����ͬ�r�������Ƶ�2H-150���y���M������ӌ��yԇ���yԇ���õ���B&K��˾4507����Ӽ��ٶ�Ӌ����1�o���ˌ�����ՓӋ�����Ӕ������^�Y����
��1 ��Ӕ������^��

5���YՓ
����(1)Ӌ��Y�����������y�õı��w�|�����w�e��Ӱ푶����wϵ�y���|�ķֲ������Ԍ��õ���ӡ�ƽ��Ӱ푷����r�����]���w���|�����w�e��
����(2)�ڌ����y���M�ЄӑB푑������r�����y��܉�T���������w��ֱ�����㲿�����|������Ӌ����w֧��������Ӱ푣����������ƽ������ò��ɺ�ҕ��
����(3)��ƽ���Ч���Ͽ���ƽ���Ļ��y������������^����ƣ�Ӌ��Y����������������λ�Ʒ�ֵ��ͣ����Y���t�ǻ��y�Ì��әC�ڲ��ӵ��_��˨�̶�����r��Ҳ���������к����ӬF��������@�pС�����y���\�Dƽ����
����(4)����Ӌ����wϵ�y�����W�������p�����y�õď��s�C���Ĕ��Wģ�ͣ�Ӌ��Y���ʴ_�ɿ����c���@�õĔ����Ǻϣ��`���ں�С�ķ����ȡ�ԓ��������ՓӋ���ɫ@�û��y�õ����λ��ֵ���Ķ���ʡ����Ӝyԇ���E�����s����������
�����C��������Ӌ����wϵ�y�����W��һ�N�dz���Ч��Ӌ�㷽��������Ӌ����wϵ�y�����W���p�����y��ձõ����ƽ���M�������ġ�ϵ�y�Ą����W���������Եõ��ʴ_�Ą����W푑����Ķ��_���p���Ŀ�ġ�ͬ�r��Ӌ����wϵ�y�����WҲ�������������Cе��ձõĄ��������У��������ձ����ܡ������Y����������Ҫ��ָ�����á�